แนวคิดการตรวจจับตาข่าย
จัดทุกอย่างให้เป็นระเบียบอยู่เสมอด้วยคอลเล็กชัน
บันทึกและจัดหมวดหมู่เนื้อหาตามค่ากำหนดของคุณ
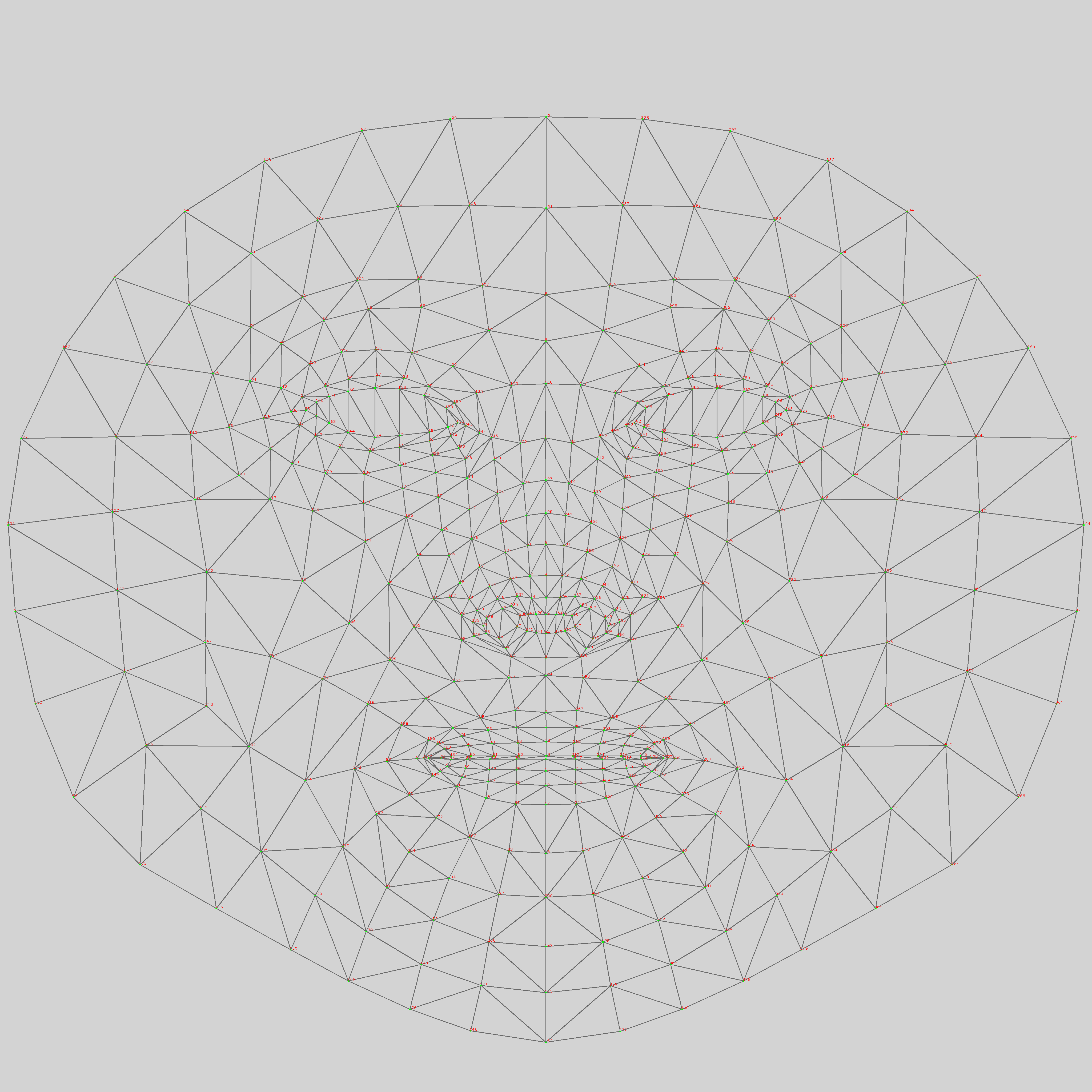
ข้อมูลตาข่ายจะมี 2 ส่วนดังนี้
4 มิติ 368 จุด: แต่ละจุดมีรหัสที่ไม่ซ้ํากันตั้งแต่ 0 ถึง 467
เชื่อมโยงอยู่กับตําแหน่งคงที่ในใบหน้าที่ตรวจพบ สําหรับแต่ละจุด
- x และ y คือพิกัดพิกเซลของใบหน้าที่ตรวจพบ
- z คือข้อมูลความลึกที่ปรับขนาดเป็นรูปภาพ ดังนั้นค่า z จะเป็นค่าลบมากขึ้นเมื่อหน้าอยู่ใกล้กับกล้องมากขึ้น จุดเริ่มต้นคือความลึก
โดยเฉลี่ยที่ 468 จุด
ข้อมูลสามเหลี่ยม: ส่วนนี้จะใช้แสดงพื้นที่รูปสามเหลี่ยมเชิงตรรกะในใบหน้าที่ตรวจพบ สามเหลี่ยมแต่ละรูปมีจุด 3 มิติ 3 จุด เช่น จุด
#0, #37 และ #164 จะสร้างพื้นที่เล็กๆ รูปสามเหลี่ยมระหว่างจมูกและริมฝีปาก
เนื้อหาของหน้าเว็บนี้ได้รับอนุญาตภายใต้ใบอนุญาตที่ต้องระบุที่มาของครีเอทีฟคอมมอนส์ 4.0 และตัวอย่างโค้ดได้รับอนุญาตภายใต้ใบอนุญาต Apache 2.0 เว้นแต่จะระบุไว้เป็นอย่างอื่น โปรดดูรายละเอียดที่นโยบายเว็บไซต์ Google Developers Java เป็นเครื่องหมายการค้าจดทะเบียนของ Oracle และ/หรือบริษัทในเครือ
อัปเดตล่าสุด 2026-04-01 UTC
[null,null,["อัปเดตล่าสุด 2026-04-01 UTC"],[],["The face mesh data consists of 468 unique 3D points, each with x and y pixel coordinates on the detected face and a z-value representing depth relative to the average depth of all points. Each point has an ID from 0 to 467. Additionally, the data includes triangle information, where each triangle is defined by three of these 3D points. These triangles create a surface representing the detected face, with each having its own IDs, such as points #0, #37, and #164.\n"]]