臉孔網格資訊包含兩個部分:
468 3D 點:每個點都有專屬的 ID,範圍從 0 到 467,與偵測到的臉部上的固定位置相關聯。每個時間點:
- x 和 y 是偵測到的臉部像素座標。
- z 是縮放為圖片大小的深度資訊,因此當臉部更接近相機時,Z 值會是負值。來源是指所有 468 個點的平均深度。
三角形資訊:用於表示所偵測臉部的邏輯三角形。每個三角形都包含三個 3D 點。例如,點 #0、#37 和 #164 會在鼻子和嘴唇之間建立小三角形區域。
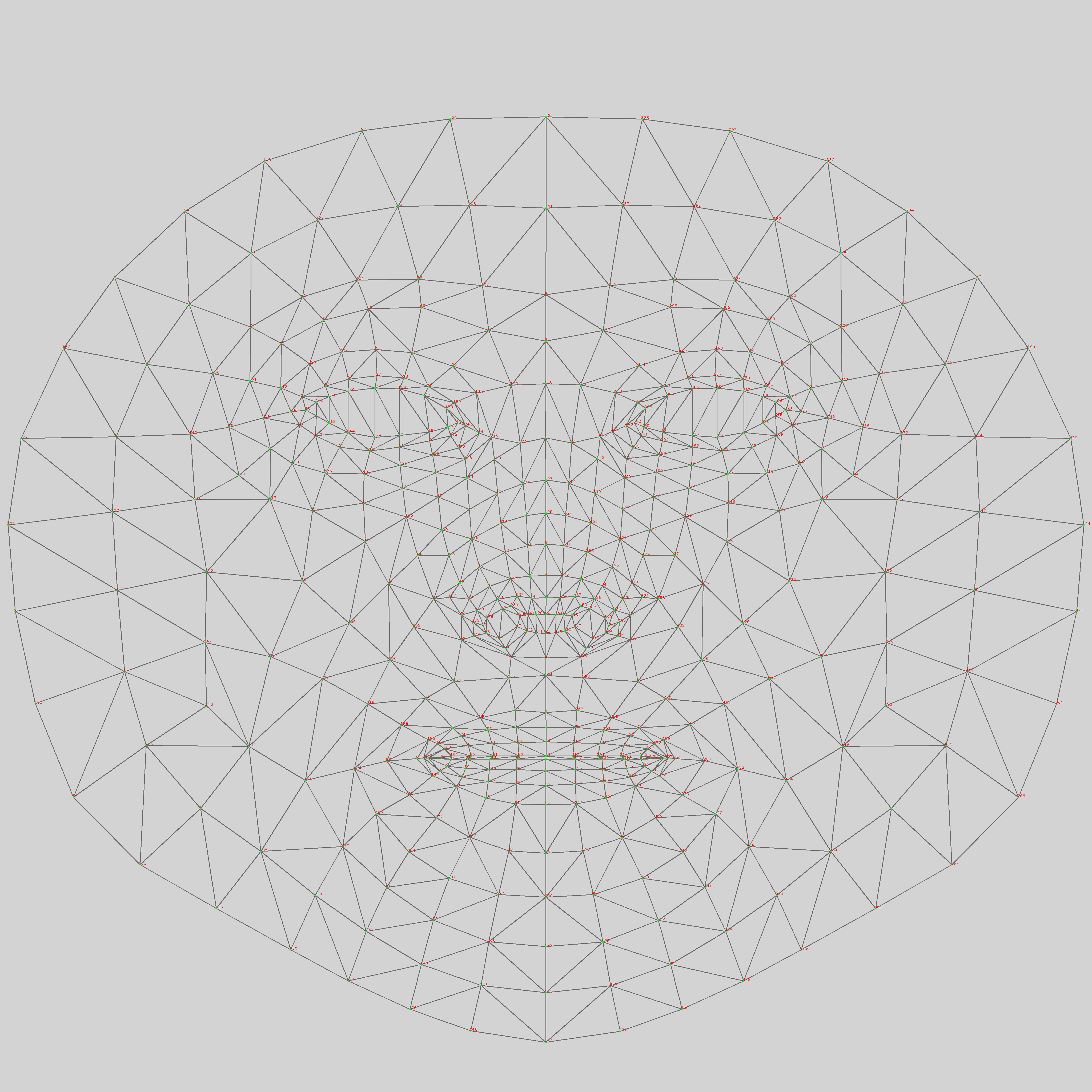
臉孔網格資訊包含兩個部分:
468 3D 點:每個點都有專屬的 ID,範圍從 0 到 467,與偵測到的臉部上的固定位置相關聯。每個時間點:
三角形資訊:用於表示所偵測臉部的邏輯三角形。每個三角形都包含三個 3D 點。例如,點 #0、#37 和 #164 會在鼻子和嘴唇之間建立小三角形區域。
除非另有註明,否則本頁面中的內容是採用創用 CC 姓名標示 4.0 授權,程式碼範例則為阿帕契 2.0 授權。詳情請參閱《Google Developers 網站政策》。Java 是 Oracle 和/或其關聯企業的註冊商標。
上次更新時間:2026-06-19 (世界標準時間)。