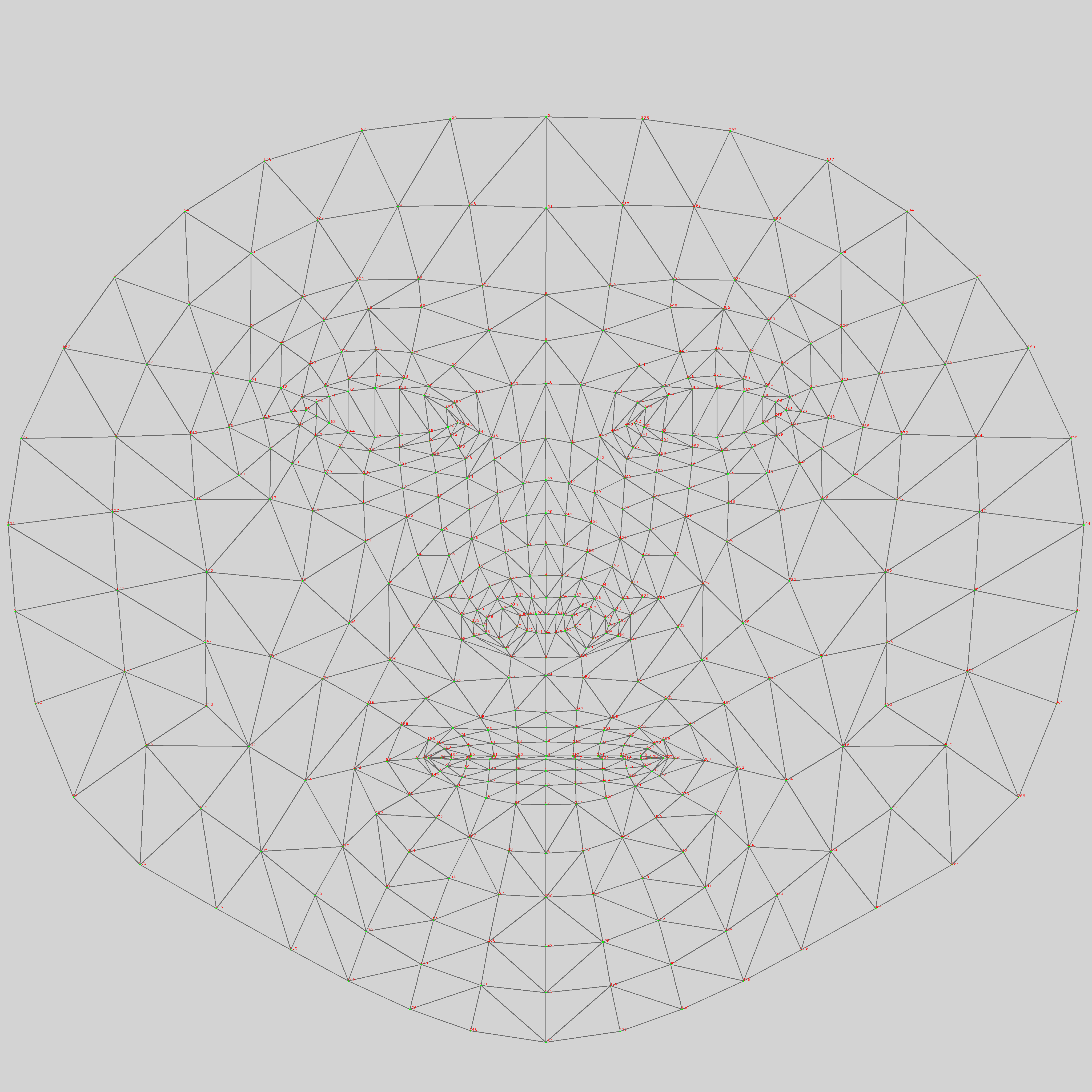
脸部网格信息包含两个部分:
468 3D 点:每个点都有一个唯一 ID,范围为 0 到 467,与检测到的人脸上的固定位置相关联。对于每个标准点:
- x 和 y 是检测到的人脸的像素坐标。
- z 是按图片大小缩放的深度信息,因此,当人脸更接近相机时,z 值会更不理想。原点是所有 468 点的平均深度。
三角形信息:用于表示所检测到的人脸中的逻辑三角形表面。每个三角形都包含三个 3D 点。例如,Points #0、#37 和 #164 会在鼻子和嘴唇之间构建小三角形区域。
脸部网格信息包含两个部分:
468 3D 点:每个点都有一个唯一 ID,范围为 0 到 467,与检测到的人脸上的固定位置相关联。对于每个标准点:
三角形信息:用于表示所检测到的人脸中的逻辑三角形表面。每个三角形都包含三个 3D 点。例如,Points #0、#37 和 #164 会在鼻子和嘴唇之间构建小三角形区域。
如未另行说明,那么本页面中的内容已根据知识共享署名 4.0 许可获得了许可,并且代码示例已根据 Apache 2.0 许可获得了许可。有关详情,请参阅 Google 开发者网站政策。Java 是 Oracle 和/或其关联公司的注册商标。
最后更新时间 (UTC):2026-04-29。