קונספט לזיהוי רשת פנים
קל לארגן דפים בעזרת אוספים
אפשר לשמור ולסווג תוכן על סמך ההעדפות שלך.
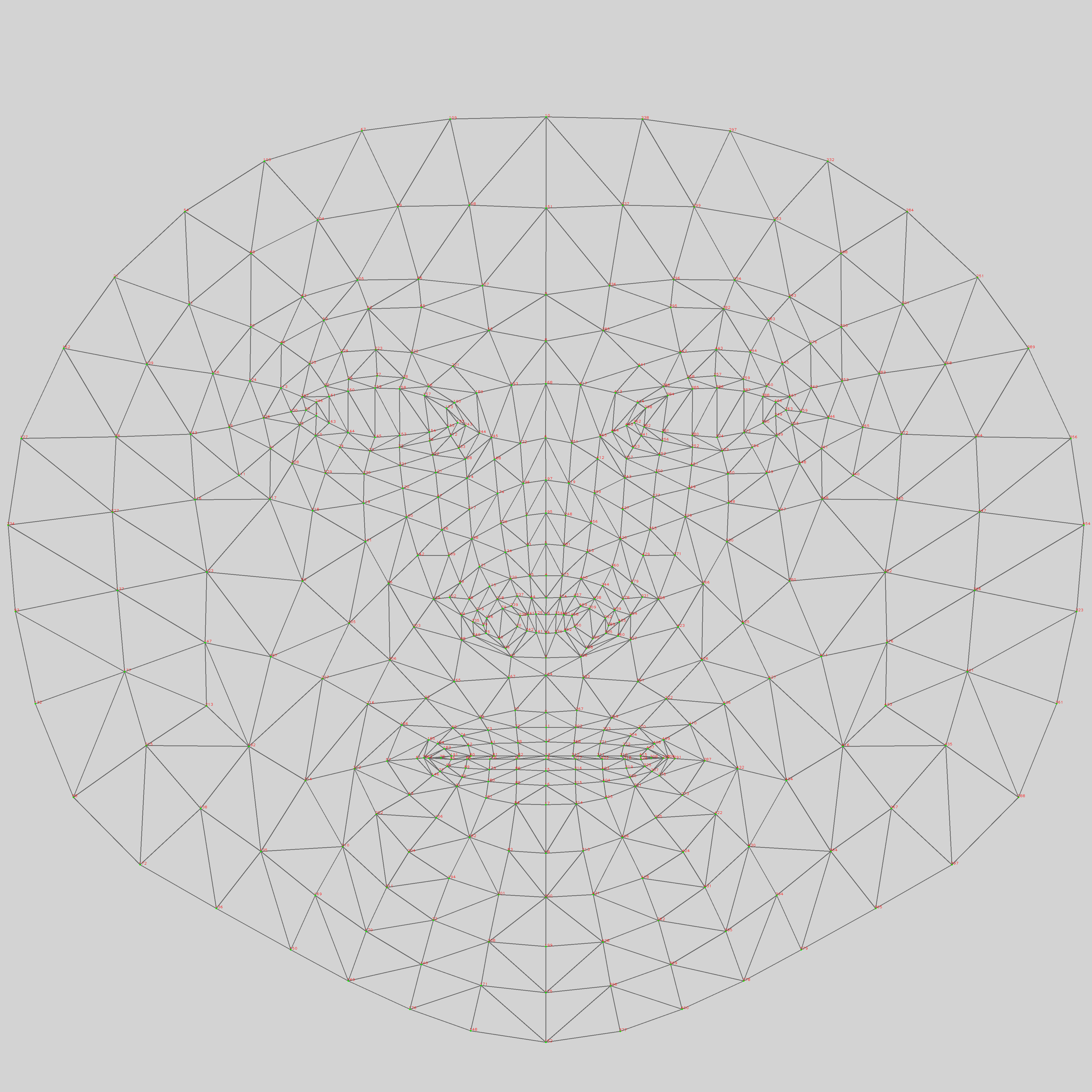
פרטי רשת הפנים כוללים שני חלקים:
368 נקודות תלת-ממדיות: לכל נקודה יש מזהה ייחודי, בין 0 ל-467, שמשויך למיקום קבוע בפנים שזוהו. לכל נקודה:
- x ו-y הם קואורדינטות של פיקסלים של הפנים שזוהו.
- z הוא מידע העומק שגודלו משתנה בהתאם לגודל התמונה, כך שערכי z-שליליים יותר כאשר הפנים קרובות יותר למצלמה. המקור הוא העומק הממוצע של כל 468 הנקודות.
פרטי משולש: משמש לייצוג משטח משולש לוגי שבפנים שזוהו. כל משולש מכיל שלוש נקודות תלת-ממדיות. לדוגמה, נקודות
0, 37 ו-164 יוצרות אזור משולש קטן בין האף
לשפתיים.
אלא אם צוין אחרת, התוכן של דף זה הוא ברישיון Creative Commons Attribution 4.0 ודוגמאות הקוד הן ברישיון Apache 2.0. לפרטים, ניתן לעיין במדיניות האתר Google Developers. Java הוא סימן מסחרי רשום של חברת Oracle ו/או של השותפים העצמאיים שלה.
עדכון אחרון: 2026-04-01 (שעון UTC).
[null,null,["עדכון אחרון: 2026-04-01 (שעון UTC)."],[],["The face mesh data consists of 468 unique 3D points, each with x and y pixel coordinates on the detected face and a z-value representing depth relative to the average depth of all points. Each point has an ID from 0 to 467. Additionally, the data includes triangle information, where each triangle is defined by three of these 3D points. These triangles create a surface representing the detected face, with each having its own IDs, such as points #0, #37, and #164.\n"]]