Pojęcia wykrywania siatki siatki
Zadbaj o dobrą organizację dzięki kolekcji
Zapisuj i kategoryzuj treści zgodnie ze swoimi preferencjami.
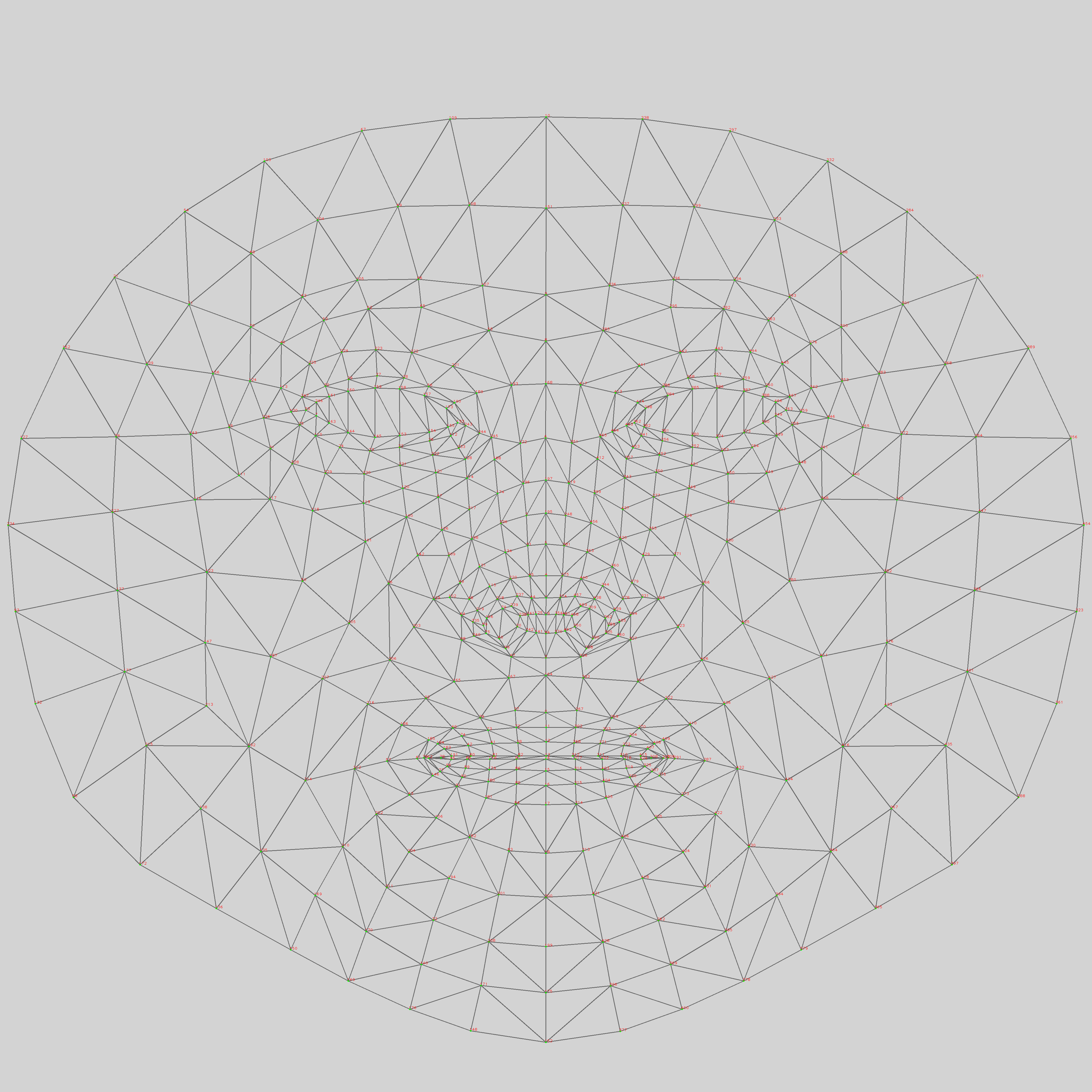
Informacje o siatce twarzy składają się z 2 części:
468 punktów 3D: każdy punkt ma unikalny identyfikator (od 0 do 467) powiązany ze stałą pozycją na wykrytej twarzy. Za każdy punkt:
- x i y to współrzędne piksela wykrytej twarzy.
- Z to informacje o głębokości, które są skalowane do rozmiaru obrazu, dzięki czemu wartości Z są bardziej ujemne, gdy twarz znajduje się bliżej aparatu. Punkt początkowy to średnia głębia wszystkich 468 punktów.
Informacje o trójkątach: przedstawia logiczną trójkąt na powierzchni wykrytej twarzy. Każdy trójkąt zawiera 3 punkty 3D. Na przykład Punkty 0, 37 i 164 tworzą mały trójkąt trójkątny między nosem i ustami.
O ile nie stwierdzono inaczej, treść tej strony jest objęta licencją Creative Commons – uznanie autorstwa 4.0, a fragmenty kodu są dostępne na licencji Apache 2.0. Szczegółowe informacje na ten temat zawierają zasady dotyczące witryny Google Developers. Java jest zastrzeżonym znakiem towarowym firmy Oracle i jej podmiotów stowarzyszonych.
Ostatnia aktualizacja: 2026-04-01 UTC.
[null,null,["Ostatnia aktualizacja: 2026-04-01 UTC."],[],["The face mesh data consists of 468 unique 3D points, each with x and y pixel coordinates on the detected face and a z-value representing depth relative to the average depth of all points. Each point has an ID from 0 to 467. Additionally, the data includes triangle information, where each triangle is defined by three of these 3D points. These triangles create a surface representing the detected face, with each having its own IDs, such as points #0, #37, and #164.\n"]]