Conceptos de detección de malla facial
Organiza tus páginas con colecciones
Guarda y categoriza el contenido según tus preferencias.
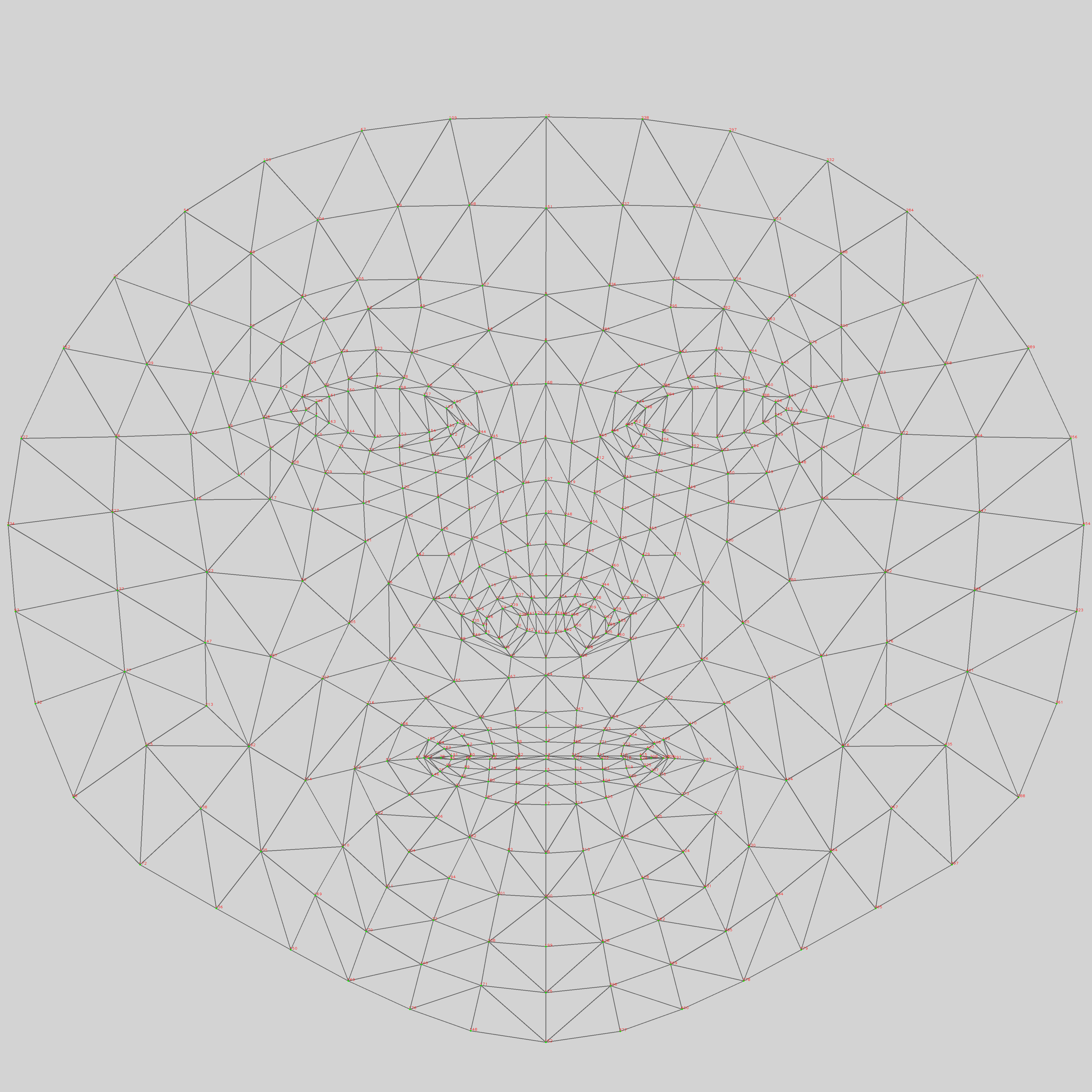
La información de la malla de rostros contiene dos partes:
468 puntos 3D: Cada punto tiene un ID único que varía de 0 a 467, asociado con una posición fija en el rostro detectado. Para cada punto:
- x e y son coordenadas de píxeles del rostro detectado.
- z es la información de profundidad escalada al tamaño de la imagen, de modo que los valores z son más negativos cuando el rostro está más cerca de la cámara. El origen es la profundidad
promedio de los 468 puntos.
Información del triángulo: Se usa para representar una superficie triangular lógica en el rostro detectado. Cada triángulo contiene tres puntos 3D. Por ejemplo, los puntos n.o 0, n.o 37 y n.o 164 construyen un área triangular pequeña entre la nariz y los labios.
Salvo que se indique lo contrario, el contenido de esta página está sujeto a la licencia Atribución 4.0 de Creative Commons, y los ejemplos de código están sujetos a la licencia Apache 2.0. Para obtener más información, consulta las políticas del sitio de Google Developers. Java es una marca registrada de Oracle o sus afiliados.
Última actualización: 2025-12-16 (UTC)
[null,null,["Última actualización: 2025-12-16 (UTC)"],[],["The face mesh data consists of 468 unique 3D points, each with x and y pixel coordinates on the detected face and a z-value representing depth relative to the average depth of all points. Each point has an ID from 0 to 467. Additionally, the data includes triangle information, where each triangle is defined by three of these 3D points. These triangles create a surface representing the detected face, with each having its own IDs, such as points #0, #37, and #164.\n"]]