- 数据集可用时间
- 2000-06-06T00:00:00Z–2022-04-02T00:00:00Z
- 数据集生产者
- 英国环境署
- 标签
说明
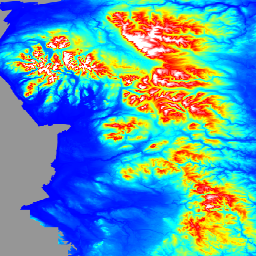
LIDAR 复合 DTM/DSM 是一种光栅地形模型,覆盖了英格兰约 99% 的区域,空间分辨率为 1 米,由英国环境署于 2022 年制作。该模型包含 3 个波段的地形数据:数字地形模型 (DTM)、首次回波数字表面模型 (DSM) 和末次回波 DSM。
DTM 是根据返回给传感器的最后一个或唯一激光脉冲生成的。使用定制的算法和手动编辑数据,从 DSM 中移除地面物体,以生成仅包含地表的地面模型。DTM 是通过将 EA 时间戳归档数据与国家 LIDAR 计划调查数据相结合而得出的,这些数据经过合并和重新采样,可提供尽可能好的覆盖范围。如果已开展重复调查,则使用最新、分辨率最高的数据。如果数据经过重采样,则在合并之前会使用双线性插值。2022 年 LiDAR 复合数据包含 2000 年 6 月 6 日至 2022 年 4 月 2 日期间进行的调查。
首次返回 DSM 是根据返回到传感器的首次或唯一激光脉冲生成的,其中包含物体(例如车辆、建筑物和植被)的高度,以及首次或唯一返回是地面时的地形表面。第一个返回 DSM 是根据 2016 年 11 月 11 日至 2022 年 5 月 5 日期间捕获的数据(作为国家 LIDAR 计划的一部分)得出的。该计划将英格兰划分为约 300 个区块,以便从 2016 年起在连续的冬季进行调查。这些调查数据会合并在一起,以创建第一个返回的 LIDAR 复合数据,并沿重叠区域使用羽化技术来消除调查之间的高程差异。请参阅数据提供商的元数据索引目录,其中显示了在生成任何位置的 LiDAR 复合数据时所用的调查。第一个返回的 DSM 在覆盖范围或程度上将与最后一个返回的 DSM 不匹配,因为最后一个返回的 DSM 复合数据是由国家 LIDAR 计划和时序调查共同生成的。
最后一个返回的 DSM 是根据返回给传感器的最后一个或唯一一个激光脉冲生成的,其中包含车辆、建筑物和植被等物体的高度以及地形表面。最后的返回 DTM 是根据 EA 时间戳存档和国家 LiDAR 计划调查的组合得出的,这些数据已合并并重新采样,以提供尽可能好的覆盖范围。如果已进行多次重复调查,则使用最新、分辨率最高的数据。如果数据经过重采样,则在合并之前会使用双线性插值。2022 年 LiDAR 复合数据包含 2000 年 6 月 6 日至 2022 年 4 月 2 日期间进行的调查。请参阅数据提供商的元数据索引目录,其中显示了任何位置在生成 LiDAR 复合数据时所用的测量数据。
数据与 OS 国家网格对齐,以米为单位呈现,以 Ordinance Survey Newlyn 为参考,并使用 OSTN'15 转换方法。用于生成合成图像的所有单独的激光雷达测量结果的垂直精度均为 +/-15 厘米的均方根误差。
频段
波段
像素大小:1 米(所有波段)
| 名称 | 单位 | 像元大小 | 说明 |
|---|---|---|---|
dtm |
米 | 1 米 | 数字地形模型 |
dsm_first |
米 | 1 米 | 首次返回数字表面模型 |
dsm_last |
米 | 1 米 | 最后一次返回数字表面模型 |
使用条款
使用条款
您可以自由地:复制、发布、分发和传输信息;改编信息;将信息用于商业和非商业用途,例如,将其与其他信息相结合,或将其纳入您自己的产品或应用中。
您必须在产品或应用中注明信息来源,方法是添加或链接到信息提供方指定的任何提供方信息声明,并尽可能提供指向许可的链接。提供方声明:Environment Agency 版权和/或数据库权利 2022 年。保留所有权利。
通过 Earth Engine 探索
代码编辑器 (JavaScript)
var img = ee.Image('UK/EA/ENGLAND_1M_TERRAIN/2022').select('dtm'); var visParam = { palette: ['0000ff', '00ffff', 'ffff00', 'ff0000', 'ffffff'], max: 630, min: -5, }; var lon = -2.5; var lat = 54; Map.addLayer(img, visParam, 'dtm'); Map.setCenter(lon, lat, 5);