- 数据集可用时间
- 2023-12-04T12:00:00Z–2026-07-21T00:00:00Z
- 数据集生产者
- Google 和 NSIDC
- 时间分辨率
- 1 天
- 标签
说明
2023-12-04 之前的数据可在旧版 NASA/SMAP/SPL3SMP_E/005 集合中找到。 这些图片最终会重新处理并添加到此合集中。
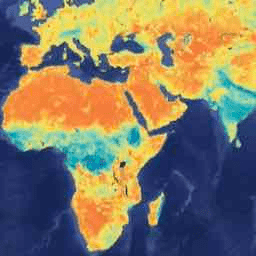
此 3 级 (L3) 土壤湿度产品提供由土壤湿度主动被动 (SMAP) L 波段辐射计检索到的全球陆地表面状况的每日合成数据。此处显示的每日数据是从降轨(当地太阳时 6 点)和升轨(当地太阳时 18 点)轨道段收集的。
SMAP 任务是一项轨道观测任务,旨在测量地球上各地表层土壤中的水量。如需了解详细说明,请参阅 SMAP 手册。 该计划于 2015 年 1 月推出,并于 2015 年 4 月开始实施。该雷达仪器因雷达电源故障于 2015 年初停止运行,但收集了近 3 个月的科学数据。为期三年的主要任务阶段于 2018 年完成,此后 SMAP 一直处于延长运行阶段。
SMAP 每 2-3 天测量一次土壤湿度。这样一来,我们就可以在从大型风暴到季节性变化重复测量的时间尺度上观测全球各地的变化。
SMAP 可测量地球上未被水覆盖或未结冰的任何地方的表层土壤含水量。它还可以区分冻结或解冻的地面。在地面未结冰的地区,SMAP 会测量全球各地土壤中矿物质、岩石物质和有机颗粒之间的水量(SMAP 测量的是地面表层中的液态水,但无法测量冰)。
在将 SPL3SMP_E 数据注入 Google Earth Engine 之前,会先使用 GDAL 库将其转换为地理坐标。
如需了解更多文档和算法详情,请参阅 SMAP L3 土壤湿度用户指南及其中引用的内容。
频段
波段
像素大小:9,000 米(所有波段)
| 名称 | 单位 | 最小值 | 最大值 | 像素大小 | 说明 |
|---|---|---|---|---|---|
soil_moisture_am |
体积分数 | 9,000 米 | 从 9 公里网格单元的分解/降尺度垂直极化亮度温度中检索到的土壤湿度估计值;上午过境 |
||
tb_h_corrected_am |
K | 0 | 330 | 9,000 米 | 水平极化亮度温度的加权平均值。此值表示校正后的陆地亮度温度(如果水面占比低于 0.9,否则不应用校正)或校正后的水面亮度温度(如果水面占比高于 0.1,否则不应用校正);上午过境 |
tb_v_corrected_am |
K | 0 | 330 | 9,000 米 | 垂直极化亮度温度的加权平均值。此值表示校正后的陆地亮度温度(如果水面占比低于 0.9,否则不应用校正)或校正后的水面亮度温度(如果水面占比高于 0.1,否则不应用校正);上午过境 |
vegetation_water_content_am |
kg/m^2 | 0 | 30 | 9,000 米 | 9 公里空间尺度下的植被含水量。使用基准算法时,此形参用作 SPL2SMAP 处理软件的输入辅助数据形参。下方的有效最小值和最大值可能会根据进一步的分析结果进行调整。AM 立交桥 |
retrieval_qual_flag_am |
0 | 65536 | 9,000 米 | 0 = 通过:土壤湿度质量可接受; 1 = 未通过:土壤湿度质量不可接受;上午过境 |
|
tb_qual_flag_h_am |
0 | 65536 | 9,000 米 | 0= 亮度温度质量不可接受;1= 亮度温度质量可接受;上午过境 |
|
tb_qual_flag_v_am |
0 | 65536 | 9,000 米 | 0= 亮度温度质量不可接受;1= 亮度温度质量可接受;上午过境 |
|
soil_moisture_pm |
体积分数 | 9,000 米 | 从 9 公里网格单元的分解/降尺度垂直极化亮度温度中检索到的土壤湿度估计值;PM 过境 |
||
tb_h_corrected_pm |
K | 0 | 330 | 9,000 米 | 水平极化亮度温度的加权平均值。如果水体比例低于 0.9,此值表示校正后的陆地亮度温度(否则不应用校正);如果水体比例高于 0.1,此值表示校正后的水体亮度温度(否则不应用校正);下午过境 |
tb_v_corrected_pm |
K | 0 | 330 | 9,000 米 | 垂直极化亮度温度的加权平均值。如果水体比例低于 0.9,此值表示校正后的陆地亮度温度(否则不应用校正);如果水体比例高于 0.1,此值表示校正后的水体亮度温度(否则不应用校正);下午过境 |
vegetation_water_content_pm |
kg/m^2 | 0 | 30 | 9,000 米 | 9 公里空间尺度下的植被含水量。使用基准算法时,此形参用作 SPL2SMAP 处理软件的输入辅助数据形参。下方的有效最小值和最大值可能会根据进一步的分析结果进行调整。PM 立交桥 |
retrieval_qual_flag_pm |
0 | 65536 | 9,000 米 | 0 = 通过:土壤湿度质量可接受; 1 = 未通过:土壤湿度质量不可接受;PM 过境 |
|
tb_qual_flag_h_pm |
0 | 65536 | 9,000 米 | 0= 亮度温度质量不合格;1= 亮度温度质量合格;PM 过境 |
|
tb_qual_flag_v_pm |
0 | 65536 | 9,000 米 | 0= 亮度温度质量不合格;1= 亮度温度质量合格;PM 过境 |
|
soil_moisture_am_anomaly |
9,000 米 | 实验性。以资产日期为中心,将“soil_moisture_am”的 30 天平均值与 2015 年至今(不包括资产年份)的相同 30 天平均值进行比较所得的差值。 如需了解异常值计算,请参阅此脚本。 |
|||
soil_moisture_pm_anomaly |
9,000 米 | 实验性。以资产日期为中心,将“soil_moisture_pm”的 30 天平均值与 2015 年至今(不包括资产年份)的相同 30 天平均值进行比较,所得的差值。 如需了解异常值计算,请参阅此脚本。 |
使用条款
使用条款
本数据集属于公共领域,使用和分发不受限制。如需更多信息,请参见 NASA 地球科学数据和信息政策。
引用
**O'Neill, P. E., 韩Chan, E. G. Njoku, T. Jackson, R. Bindlish, J. Chaubell 和 A. Colliander。2021 年。SMAP 增强型 L3 辐射计全球和极地网格每日 9 公里 EASE 网格土壤湿度,版本 5。[指明所用子集]。美国科罗拉多州博尔德。美国国家航空航天局国家冰雪数据中心分布式主动归档中心。 doi:10.5067/4DQ54OUIJ9DL
Entekhabi 等,2014 年 D. Entekhabi, S. Yueh, P. O'Neill, K. Kellogg 等人,《SMAP 手册》-《Soil Moisture Active Passive:从太空绘制土壤湿度和冻融图》。SMAP Project, Jet Propulsion Laboratory, Pasadena, CA (2014) SMAP Handbook
Chan, S. K.,R. Bindlish, P. E. O'Neill, E. Njoku, T. Jackson, A. Colliander, F. Chen, M.Burgin, S. Dunbar, J. Piepmeier, S. Yueh, D. Entekhabi, M. H. Cosh, T. Caldwell, J. Walker, X. Wu, A. Berg, T. Rowlandson, A. Pacheco, H. McNairn, M. Thibeault, J. Martinez-Fernandez, A. Gonzalez-Zamora, M. Seyfried, D. Bosch, P. Starks, D. Goodrich, J. Prueger, M. Palecki, E. E. Small, M. Zreda, J.-C. Calvet, W. T. Crow,以及 Y. Kerr. 2016 年。“Assessment of the SMAP Passive Soil Moisture Product”IEEE Transactions on Geoscience and Remote Sensing, 54 (8): 4994-5007 10.1109/tgrs.2016.2561938
Chan, S.、R. Bindlish, P. O'Neill, T. Jackson, E. Njoku, S. Dunbar, J. Chaubell, J. Piepmeier, S. Yueh, D. Entekhabi, A. Colliander, F. Chen, M.Cosh, T. Caldwell, J. Walker, A. Berg, H. McNairn, M. Thibeault, J. Martínez-Fernández, F. Uldall, M. Seyfried, D. Bosch, P. Starks, C. Holifield Collins, J. Prueger、R. van der Velde、J. Asanuma, M. Palecki, E. Small, M. Zreda, J. Calvet, W. Crow,以及 Y. Kerr. 2018 年。“Development and assessment of the SMAP enhanced passive soil moisture product.”Remote Sensing of Environment,204:931-941 10.1016/j.rse.2017.08.025
Chaubell, M. J. J. Asanuma, A. A. Berg, D. D. Bosch, T. Caldwell, M. H. Cosh, C. H. Collins, J. Martinez-Fernandez, M. Seyfried, P. J. Starks, Z. Su, S. H. Yueh, M. Thibeault, J. Walker, R. 韩Dunbar, A. Colliander, F. Chen, S. K. Chan, D. Entekhabi, R. Bindlish 和 P. E. 奥尼尔。2020 年。“改进了 SMAP 双通道算法,用于反演土壤湿度。”IEEE 地球科学与遥感事务,1-12 10.1109/tgrs.2019.2959239
DOI
通过 Earth Engine 探索
代码编辑器 (JavaScript)
var dataset = ee.ImageCollection('NASA/SMAP/SPL3SMP_E/006') .filter(ee.Filter.date('2024-01-01', '2024-01-31')); var soilMositureSurface = dataset.select('soil_moisture_am'); var soilMositureSurfaceVis = { min: 0.0, max: 0.5, palette: ['0300ff', '418504', 'efff07', 'efff07', 'ff0303'], }; Map.setCenter(-6.746, 46.529, 2); Map.addLayer(soilMositureSurface, soilMositureSurfaceVis, 'Soil Mositure');