- Dataset-Verfügbarkeit
- 1985-01-01T00:00:00Z–2024-12-31T00:00:00Z
- Dataset-Anbieter
- USDA Forest Service (USFS) Field Services and Innovation Center Geospatial Office (FSIC-GO)
- Tags
Beschreibung
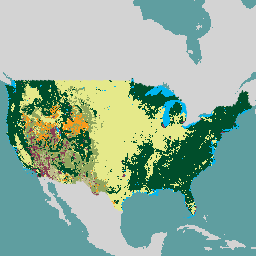
Dieses Produkt ist Teil der LCMS-Datensuite (Landscape Change Monitoring System). Sie zeigt die durch LCMS modellierte Änderung, die Landbedeckung und/oder die Landnutzungsklassen für jedes Jahr und umfasst die zusammenhängenden Vereinigten Staaten (CONUS) sowie Gebiete außerhalb der CONUS (OCONUS), einschließlich Alaska (AK), Puerto Rico und die US-Jungferninseln (PRUSVI) und Hawaii (HAWAII).
LCMS ist ein auf Fernerkundung basierendes System zur Kartierung und Überwachung von Landschaftsveränderungen in den Vereinigten Staaten. Ziel ist es, einen konsistenten Ansatz zu entwickeln, der die neuesten Technologien und Fortschritte bei der Änderungserkennung nutzt, um eine „bestmögliche“ Karte der Landschaftsveränderungen zu erstellen.
Die Ausgaben umfassen drei jährliche Produkte: Änderung, Bodenbedeckung und Landnutzung. Die Ausgabe des Änderungsmodells bezieht sich speziell auf die Vegetationsdecke und umfasst langsamen Verlust, schnellen Verlust (der auch hydrologische Veränderungen wie Überschwemmung oder Austrocknung umfasst) und Zunahme. Diese Werte werden für jedes Jahr der Landsat-Zeitreihe prognostiziert und dienen als Grundlage für LCMS. Wir wenden ein Regelwerk auf Grundlage von Hilfsdatensätzen an, um das endgültige Änderungsprodukt zu erstellen. Dabei handelt es sich um eine Verfeinerung/Reklassifizierung der modellierten Änderung in 15 Klassen, die explizit Informationen zur Ursache der Landschaftsveränderung liefern (z. B. Baumentfernung, Waldbrand, Windschaden). Karten zur Landbedeckung und Landnutzung zeigen die Landbedeckung auf Lebensformebene und die Landnutzung auf breiter Ebene für jedes Jahr.
Da kein Algorithmus in allen Situationen am besten funktioniert, verwendet LCMS ein Ensemble von Modellen als Vorhersagen, was die Kartenrichtigkeit in einer Reihe von Ökosystemen und Änderungsprozessen verbessert (Healey et al., 2018). Die resultierenden Karten zu LCMS-Änderungen, Landbedeckung und Landnutzung bieten eine ganzheitliche Darstellung der Landschaftsveränderungen in den USA seit 1985.
Zu den Vorhersageschichten für das LCMS-Modell gehören Ausgaben der LandTrendr- und CCDC-Algorithmen zur Änderungserkennung sowie Geländedaten. Auf diese Komponenten wird über Google Earth Engine zugegriffen und sie werden damit verarbeitet (Gorelick et al., 2017).
Für die Erstellung jährlicher Composites für LandTrendr wurden USGS Collection 2 Landsat Tier 1- und Sentinel 2A-, 2B-Level-1C-Daten zur Reflexion am oberen Rand der Atmosphäre verwendet. Der cFmask-Algorithmus zur Wolkenmaskierung (Foga et al., 2017), einer Implementierung von Fmask 2.0 (Zhu und Woodcock, 2012) (nur Landsat), cloudScore (Chastain et al., 2019) (nur Landsat), s2cloudless (Sentinel-Hub, 2021) und Cloud Score+ (Pasquarella et al., 2023) (nur Sentinel 2) werden zum Maskieren von Wolken verwendet, während TDOM (Chastain et al., 2019) wird verwendet, um Wolkenschatten zu maskieren (Landsat und Sentinel 2). Für LandTrendr wird dann der jährliche Medoid berechnet, um wolken- und schattenfreie Werte aus jedem Jahr in einem einzigen Composite zusammenzufassen. Für CCDC wurden für die kontinentalen USA (CONUS) die Landsat Tier 1-Daten zur Oberflächenreflektanz aus der USGS Collection 2 und für AK, PRUSVI und HAWAII die Landsat Tier 1-Daten zur Reflektanz am oberen Rand der Atmosphäre verwendet.
Die zusammengesetzte Zeitreihe wird mit LandTrendr zeitlich segmentiert (Kennedy et al., 2010; Kennedy et al., 2018; Cohen et al., 2018).
Alle wolken- und schattenfreien Werte werden auch zeitlich mit dem CCDC-Algorithmus segmentiert (Zhu und Woodcock, 2014).
Zu den Vorhersagedaten gehören rohe zusammengesetzte Werte, angepasste LandTrendr-Werte, paarweise Differenzen, Segmentdauer, Änderungsausmaß und ‑neigung sowie CCDC-Sinus- und ‑Kosinuskoeffizienten (erste 3 Obertöne), angepasste Werte und paarweise Differenzen sowie Höhe, Neigung, Sinus des Aspekts, Kosinus des Aspekts und topografische Positionsindizes (Weiss, 2001) aus den 3DEP-Daten (3D Elevation Program) des USGS (U.S. Geological Survey, 2019) mit einer Auflösung von 10 m.
Referenzdaten werden mit TimeSync erfasst, einem webbasierten Tool, mit dem Analysten den Landsat-Datensatz von 1984 bis heute visualisieren und interpretieren können (Cohen et al., 2010).
Mithilfe von Referenzdaten aus TimeSync und Vorhersagedaten aus LandTrendr, CCDC und Geländeindizes wurden Random Forest-Modelle (Breiman, 2001) trainiert, um jährliche Änderungen, Landbedeckungs- und Landnutzungsklassen vorherzusagen. Nach der Modellierung legen wir eine Reihe von Wahrscheinlichkeitsschwellen und Regelsätzen fest, die auf zusätzlichen Datasets basieren, um die qualitativen Kartenausgaben zu verbessern und Fehler durch Auslassung und Aufnahme zu reduzieren. Weitere Informationen finden Sie im LCMS Methods Brief in der Beschreibung.
Zusätzliche Ressourcen
Ein detaillierteres Codebeispiel für die Verwendung von LCMS-Daten
Der LCMS Data Explorer ist eine webbasierte Anwendung, mit der Nutzer LCMS-Daten ansehen, analysieren, zusammenfassen und herunterladen können.
Weitere Informationen zu Methoden und Genauigkeitsbewertung finden Sie im LCMS Methods Brief. Daten-Downloads, Metadaten und Supportdokumente finden Sie im LCMS Geodata Clearinghouse.
Der String HAWAII wird in der kommenden Datenversion 2025.11 zu HI aktualisiert.
Bei Fragen oder spezifischen Datenanfragen wenden Sie sich bitte an sm.fs.lcms@usda.gov.
Bänder
Pixelgröße
30 Meter
Bänder
| Name | Pixelgröße | Beschreibung | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Change |
Meter | Endgültiges thematisches LCMS-Änderungsprodukt. Für jedes Jahr werden insgesamt 15 Änderungsklassen zugeordnet. Die Änderung wird grundsätzlich mit drei separaten binären Random Forest-Modellen für jedes Untersuchungsgebiet modelliert: langsamer Verlust, schneller Verlust und Zunahme. Jedes Pixel wird der modellierten Änderungsklasse mit der höchsten Wahrscheinlichkeit zugewiesen, die auch über einem bestimmten Schwellenwert liegt. Alle Pixel, die keinen Wert über dem jeweiligen Schwellenwert der einzelnen Klassen haben, werden der Klasse „Stabil“ zugewiesen. Anhand eines Regelsatzes, der die modellierte Änderungsklasse, zusätzliche Datasets (z. B. TCC, MTBS und IDS) und LCMS-Daten zur Landbedeckung verwendet, wird jedem Pixel eine der 15 verfeinerten Klassen für die Ursache der Änderung zugewiesen. Weitere Informationen zum Regelsatz und den verwendeten Hilfs-Datasets finden Sie im LCMS Methods Brief, auf den in der Beschreibung verlinkt wird. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover |
Meter | Endgültiges thematisches LCMS-Produkt zur Bodenbedeckung. Insgesamt 14 Bodenbedeckungsklassen werden jährlich mithilfe von TimeSync-Referenzdaten und spektralen Informationen aus Landsat-Bildern kartiert. Die Landbedeckung wird mit einem einzelnen Multiklassen-Random Forest-Modell vorhergesagt, das ein Array mit den Wahrscheinlichkeiten jeder Klasse ausgibt (Anteil der Bäume im Random Forest-Modell, die jede Klasse „ausgewählt“ haben). Die endgültigen Klassen werden der Landnutzung mit der höchsten Wahrscheinlichkeit zugewiesen. Bevor die Landbedeckungsklasse mit der höchsten Wahrscheinlichkeit zugewiesen wurde, wurden je nach Untersuchungsgebiet ein bis mehrere Wahrscheinlichkeitsschwellen und Regelsätze mit zusätzlichen Datasets angewendet. Weitere Informationen zu den Wahrscheinlichkeitsschwellen und Regelsätzen finden Sie im LCMS Methods Brief, der in der Beschreibung verlinkt ist. Sieben Bodenbedeckungsklassen geben eine einzelne Bodenbedeckung an, bei der der entsprechende Typ den größten Teil der Pixelfläche abdeckt und keine andere Klasse mehr als 10% des Pixels abdeckt. Außerdem gibt es sieben gemischte Klassen. Diese Pixel werden durch eine zusätzliche Landbedeckungsklasse abgedeckt, die mindestens 10% des Pixels ausmacht. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use |
Meter | Endgültiges thematisches LCMS-Produkt zur Landnutzung. Insgesamt werden jährlich fünf Landnutzungsklassen mithilfe von TimeSync-Referenzdaten und Spektralinformationen aus Landsat-Bildern kartiert. Die Landnutzung wird mit einem einzelnen Multiklassen-Random Forest-Modell vorhergesagt, das ein Array mit den Wahrscheinlichkeiten für jede Klasse ausgibt (Anteil der Bäume im Random Forest-Modell, die jede Klasse „ausgewählt“ haben). Die endgültigen Klassen werden der Landnutzung mit der höchsten Wahrscheinlichkeit zugewiesen. Bevor die Landnutzungsklasse mit der höchsten Wahrscheinlichkeit zugewiesen wurde, wurden eine Reihe von Wahrscheinlichkeitsschwellen und Regelsätzen mit zusätzlichen Datasets angewendet. Weitere Informationen zu den Wahrscheinlichkeitsschwellen und Regelsätzen finden Sie im LCMS Methods Brief, der in der Beschreibung verlinkt ist. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Slow_Loss |
Meter | Die Rohdaten für die LCMS-modellierte Wahrscheinlichkeit für langsamen Verlust. „Slow Loss“ umfasst die folgenden Klassen aus der Interpretation des TimeSync-Änderungsprozesses:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Fast_Loss |
Meter | Die Rohwahrscheinlichkeit für einen schnellen Verlust, die mit LCMS modelliert wurde. „Fast Loss“ umfasst die folgenden Klassen aus der Interpretation des TimeSync-Änderungsprozesses:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Gain |
Meter | Die Rohwahrscheinlichkeit für den Kampagnen-Gain, die mit LCMS modelliert wurde. Definiert als: Land mit einer Zunahme der Vegetationsdecke aufgrund von Wachstum und Sukzession über ein oder mehrere Jahre hinweg. Gilt für alle Gebiete, in denen spektrale Veränderungen im Zusammenhang mit dem Nachwachsen von Vegetation auftreten können. In bebauten Gebieten kann das Wachstum auf die Reifung der Vegetation und/oder neu angelegte Rasenflächen und Landschaftsgestaltung zurückzuführen sein. Im Wald umfasst das Wachstum das Wachstum von Vegetation auf unbewachsenem Boden sowie das Überragen von Bäumen mittlerer und gleichrangiger Höhe und/oder tiefer liegenden Gräsern und Sträuchern. Segmente für Wachstum/Erholung, die nach der Holznutzung aufgezeichnet werden, durchlaufen wahrscheinlich verschiedene Landbedeckungsklassen, wenn sich der Wald regeneriert. Damit diese Änderungen als Wachstum/Erholung betrachtet werden können, sollten die Spektralwerte über mehrere Jahre hinweg einem steigenden Trend folgen (z. B. einer positiven Steigung, die, wenn sie auf etwa 20 Jahre verlängert würde, in der Größenordnung von 0,10 Einheiten des NDVI läge). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Trees |
Meter | Die Wahrscheinlichkeit von „Bäume“ wird im LCMS-Rohmodell geschätzt. Definiert als: Der Großteil des Pixels besteht aus lebenden oder stehenden toten Bäumen. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Tall-Shrubs-and-Trees-Mix |
Meter | Rohmodellierte LCMS-Wahrscheinlichkeit für „Tall Shrubs and Trees Mix“ (nur AK). Definiert als: Der Großteil der Pixel besteht aus Sträuchern mit einer Höhe von mehr als 1 Meter und zu mindestens 10% aus lebenden oder stehenden toten Bäumen. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Shrubs-and-Trees-Mix |
Meter | Die Rohdaten für die modellierte Wahrscheinlichkeit für die Mischung aus Sträuchern und Bäumen aus LCMS. Definiert als: Der Großteil der Pixel besteht aus Sträuchern und mindestens 10% der Pixel bestehen aus lebenden oder stehenden toten Bäumen. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb-and-Trees-Mix |
Meter | Die Rohwahrscheinlichkeit für die Mischung aus Gras/Kraut/Pflanze und Bäumen, die mit LCMS modelliert wurde. Definiert als: Der Großteil der Pixel besteht aus mehrjährigen Gräsern, Kräutern oder anderen Formen krautiger Vegetation und enthält außerdem mindestens 10% lebende oder stehende tote Bäume. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Trees-Mix |
Meter | Die Rohwahrscheinlichkeit für „Barren and Trees Mix“ (Mischung aus kargem Land und Bäumen) aus dem LCMS-Modell. Definiert als: Der Großteil des Pixels besteht aus unbedecktem Boden, der durch Störungen freigelegt wurde (z.B. Boden, der durch mechanische Rodung oder Holzeinschlag freigelegt wurde), sowie aus dauerhaft unfruchtbaren Gebieten wie Wüsten, Salzseen, Felsaufschlüssen (einschließlich Mineralien und anderen geologischen Materialien, die durch den Tagebau freigelegt wurden), Sanddünen, Salzebenen und Stränden. Auch Straßen aus Schmutz und Schotter gelten als kahl und bestehen zu mindestens 10% aus lebenden oder stehenden toten Bäumen. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Tall-Shrubs |
Meter | Rohdaten für die modellierte Wahrscheinlichkeit von LCMS für hohe Sträucher (nur Alaska). Definiert als: Der Großteil des Pixels besteht aus Sträuchern mit einer Höhe von mehr als 1 Meter. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Shrubs |
Meter | Die Rohwahrscheinlichkeit für Sträucher, die mit LCMS modelliert wurde. Definiert als: Der Großteil des Pixels besteht aus Sträuchern. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb-and-Shrubs-Mix |
Meter | Rohdaten für die LCMS-Modellwahrscheinlichkeit für eine Mischung aus Gras, Kräutern und Sträuchern. Definiert als: Der Großteil der Pixel besteht aus mehrjährigen Gräsern, Kräutern oder anderen Formen krautiger Vegetation und enthält außerdem mindestens 10% Sträucher. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Shrubs-Mix |
Meter | Die Rohwahrscheinlichkeit für „Barren and Shrubs Mix“ (Mischung aus Ödland und Sträuchern) gemäß LCMS-Modell. Definiert als: Der Großteil des Pixels besteht aus unbedecktem Boden, der durch Störungen freigelegt wurde (z.B. Boden, der durch mechanische Rodung oder Holzeinschlag freigelegt wurde), sowie aus dauerhaft unfruchtbaren Gebieten wie Wüsten, Salzseen, Felsaufschlüssen (einschließlich Mineralien und anderen geologischen Materialien, die durch den Tagebau freigelegt wurden), Sanddünen, Salzebenen und Stränden. Auch Straßen aus Erde und Schotter gelten als kahl und bestehen zu mindestens 10% aus Sträuchern. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb |
Meter | Die Rohwahrscheinlichkeit für Gras/Kraut/Pflanze, die mit LCMS modelliert wurde. Definiert als: Der Großteil der Pixel besteht aus mehrjährigen Gräsern, Kräutern oder anderen Formen krautiger Vegetation. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Grass-Forb-Herb-Mix |
Meter | Rohdaten für die modellierte Wahrscheinlichkeit von Barren und Grass/Forb/Herb Mix aus LCMS. Definiert als: Der Großteil des Pixels besteht aus unbedecktem Boden, der durch Störungen freigelegt wurde (z.B. Boden, der durch mechanische Rodung oder Holzerntemaßnahmen freigelegt wurde), sowie aus dauerhaft unfruchtbaren Gebieten wie Wüsten, Salzseen, Felsaufschlüssen (einschließlich Mineralien und anderen geologischen Materialien, die durch den Tagebau freigelegt wurden), Sanddünen, Salzebenen und Stränden. Auch Straßen aus Erde und Kies gelten als kahl und bestehen zu mindestens 10% aus mehrjährigen Gräsern, Kräutern oder anderen Formen krautiger Vegetation. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-or-Impervious |
Meter | Die Wahrscheinlichkeit für „Kahl“ oder „Undurchlässig“ wird auf Grundlage von Rohdaten des LCMS modelliert. Definiert als: Der Großteil des Pixels besteht aus 1.) durch Störungen freigelegtem unbedecktem Boden (z.B. durch mechanische Rodung oder Holzeinschlag freigelegter Boden) sowie aus dauerhaft unfruchtbaren Gebieten wie Wüsten, Salzseen, Felsaufschlüssen (einschließlich Mineralien und anderen geologischen Materialien, die durch den Tagebau freigelegt wurden), Sanddünen, Salzebenen und Stränden. Auch Straßen aus Schmutz und Kies gelten als karg oder 2.) von Menschen geschaffene Materialien, in die Wasser nicht eindringen kann, z. B. gepflasterte Straßen, Dächer und Parkplätze. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Snow-or-Ice |
Meter | Die Wahrscheinlichkeit für Schnee oder Eis, die im LCMS-Rohmodell berechnet wurde. Definiert als: Der Großteil des Pixels besteht aus Schnee oder Eis. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Water |
Meter | Die Rohwahrscheinlichkeit für Wasser, die mit LCMS modelliert wurde. Definiert als: Der Großteil des Pixels besteht aus Wasser. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Agriculture |
Meter | Die rohe, auf LCMS basierende Wahrscheinlichkeit für Landwirtschaft. Definiert als: Land, das für die Produktion von Lebensmitteln, Fasern und Brennstoffen genutzt wird und sich entweder in einem vegetativen oder nicht vegetativen Zustand befindet. Dazu gehören unter anderem landwirtschaftliche Nutzflächen, Heuwiesen, Obstgärten, Weinberge, Tierhaltungsbetriebe und Flächen, die für die Produktion von Obst, Nüssen oder Beeren bepflanzt werden. Straßen, die hauptsächlich für landwirtschaftliche Zwecke genutzt werden (d.h. nicht für den öffentlichen Verkehr von Stadt zu Stadt), gelten als landwirtschaftliche Nutzung. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Developed |
Meter | Die Rohwahrscheinlichkeit für „Entwickelt“ aus dem LCMS-Modell. Definiert als: Land, das von künstlichen Strukturen bedeckt ist (z.B. Wohn-, Gewerbe-, Industrie-, Bergbau- oder Transportgebiete mit hoher Dichte) oder eine Mischung aus Vegetation (einschließlich Bäumen) und Strukturen (z.B. Wohngebiete mit geringer Dichte, Rasenflächen, Freizeiteinrichtungen, Friedhöfe, Transport- und Versorgungskorridore usw.), einschließlich aller Flächen, die durch menschliche Aktivitäten funktional verändert wurden. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Forest |
Meter | Die Wahrscheinlichkeit für „Forest“ (Wald) aus dem LCMS-Rohmodell. Definiert als: Land, das bepflanzt oder natürlich bewachsen ist und das zu einem bestimmten Zeitpunkt während einer kurzfristigen Sukzessionsfolge eine Baumdeckung von mindestens 10% aufweist oder wahrscheinlich aufweisen wird. Dazu können Laub-, immergrüne und/oder gemischte Kategorien von Naturwald, Forstplantagen und bewaldeten Feuchtgebieten gehören. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Other |
Meter | Die Rohwahrscheinlichkeit für „Andere“ aus dem LCMS-Modell. Definiert als: Land (unabhängig von der Nutzung), bei dem der spektrale Trend oder andere unterstützende Beweise auf ein Störungs- oder Änderungsereignis hinweisen, die endgültige Ursache jedoch nicht ermittelt werden kann oder die Art der Änderung keiner der oben definierten Kategorien für Änderungsprozesse entspricht. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Rangeland-or-Pasture |
Meter | Die Rohwahrscheinlichkeit für Weideland oder Grünland, die mit LCMS modelliert wurde. Definiert als: Diese Klasse umfasst alle Bereiche, die entweder a.) Weideland, auf dem die Vegetation aus einer Mischung aus einheimischen Gräsern, Sträuchern, Kräutern und grasartigen Pflanzen besteht, die hauptsächlich auf natürliche Faktoren und Prozesse wie Niederschlag, Temperatur, Höhe und Feuer zurückzuführen sind, obwohl ein begrenztes Management das vorgeschriebene Abbrennen sowie das Weiden von Haus- und Wildherbivoren umfassen kann; oder b.) Weide, auf der die Vegetation von gemischten, weitgehend natürlichen Gräsern, Kräutern und Pflanzen bis hin zu einer stärker bewirtschafteten Vegetation reichen kann, die von Gräsern dominiert wird, die gesät und so bewirtschaftet wurden, dass sie fast eine Monokultur bilden. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
QA_Bits |
Meter | Zusätzliche Informationen zum Ursprung der jährlichen LCMS-Produktausgabewerte. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Klassentabelle ändern
| Wert | Farbe | Beschreibung |
|---|---|---|
| 1 | #ff09f3 | Wind |
| 2 | #541aff | Hurrikan |
| 3 | #e4f5fd | Übergang mit Schnee oder Eis |
| 4 | #cc982e | Austrocknung |
| 5 | #0adaff | Überschwemmung |
| 6 | #a10018 | Vorgeschriebenes Feuer |
| 7 | #d54309 | Wildfire |
| 8 | #fafa4b | Mechanische Landtransformation |
| 9 | #afde1c | Baumentfernung |
| 10 | #ffc80d | Entlaubung |
| 11 | #a64c28 | Südlicher Kiefernkäfer |
| 12 | #f39268 | Insekten-, Krankheits- oder Dürrestress |
| 13 | #c291d5 | Sonstiger Verlust |
| 14 | #00a398 | Sukzessionelles Wachstum der Vegetation |
| 15 | #3d4551 | Stabil |
| 16 | #1b1716 | Maske für Bereiche, die nicht verarbeitet werden |
Klassentabelle für „Land_Cover“
| Wert | Farbe | Beschreibung |
|---|---|---|
| 1 | #004e2b | Bäume |
| 2 | #009344 | Mischung aus hohen Sträuchern und Bäumen (nur AK) |
| 3 | #61bb46 | Sträucher- und Bäume-Mix |
| 4 | #acbb67 | Mischung aus Gräsern, Kräutern und Bäumen |
| 5 | #8b8560 | Barren- und Baum-Mix |
| 6 | #cafd4b | Hohe Sträucher (nur AK) |
| 7 | #f89a1c | Sträucher |
| 8 | #8fa55f | Mischung aus Gräsern, Kräutern und Sträuchern |
| 9 | #bebb8e | Mischung aus kargen Böden und Sträuchern |
| 10 | #e5e98a | Gras/Kraut |
| 11 | #ddb925 | Mischung aus kargen Böden und Gras/Kräutern/Blütenpflanzen |
| 12 | #893f54 | Kahl oder undurchlässig |
| 13 | #e4f5fd | Schnee oder Eis |
| 14 | #00b6f0 | Wasser |
| 15 | #1b1716 | Maske für Bereiche, die nicht verarbeitet werden |
Klassentabelle für Land_Use
| Wert | Farbe | Beschreibung |
|---|---|---|
| 1 | #fbff97 | Landwirtschaft |
| 2 | #e6558b | Entwickelt |
| 3 | #004e2b | Wald |
| 4 | #9dbac5 | Sonstiges |
| 5 | #a6976a | Weideland oder Weide |
| 6 | #1b1716 | Maske für Bereiche, die nicht verarbeitet werden |
Bildattribute
Bildattribute
| Name | Typ | Beschreibung |
|---|---|---|
| study_area | STRING | Diese LCMS-Version umfasst die kontinentalen USA, Alaska, Puerto Rico und die Amerikanischen Jungferninseln sowie Hawaii. Mögliche Werte: „CONUS, AK, PRUSVI, HAWAII“ |
| Version | STRING | Version des Produkts |
| startYear | INT | Startjahr des Produkts |
| endYear | INT | Endjahr des Produkts |
| Jahr | INT | Jahr des Produkts |
Nutzungsbedingungen
Nutzungsbedingungen
Der USDA Forest Service übernimmt keine ausdrückliche oder stillschweigende Gewährleistung, einschließlich der Gewährleistung der Marktgängigkeit und der Eignung für einen bestimmten Zweck, und übernimmt keine rechtliche Haftung oder Verantwortung für die Richtigkeit, Zuverlässigkeit, Vollständigkeit oder Nützlichkeit dieser Geodaten oder für die unsachgemäße oder falsche Verwendung dieser Geodaten. Diese Geodaten und zugehörigen Karten oder Grafiken sind keine rechtlichen Dokumente und sind nicht als solche gedacht. Die Daten und Karten dürfen nicht verwendet werden, um Eigentumsrechte, rechtliche Beschreibungen oder Grenzen, Gerichtsbarkeiten oder Einschränkungen zu bestimmen, die für öffentliches oder privates Land gelten. Naturgefahren werden möglicherweise in den Daten und Karten dargestellt. Landnutzer sollten Vorsicht walten lassen. Die Daten sind dynamisch und können sich im Laufe der Zeit ändern. Der Nutzer ist dafür verantwortlich, die Einschränkungen der Geodaten zu überprüfen und die Daten entsprechend zu verwenden.
Diese Daten wurden mit Mitteln der US-Regierung erhoben und können ohne zusätzliche Berechtigungen oder Gebühren verwendet werden. Wenn Sie diese Daten in einer Publikation, Präsentation oder einem anderen Forschungsprodukt verwenden, geben Sie bitte die folgende Quelle an:
USDA Forest Service. 2025) USFS Landscape Change Monitoring System v2024.10 (zusammenhängende USA und äußere zusammenhängende USA). Salt Lake City, Utah.
Zitationen
USDA Forest Service. 2025) USFS Landscape Change Monitoring System, Version 2024.10 (USA und Außengebiete). Salt Lake City, Utah.
Breiman, L., 2001. Random Forests. Im Bereich des maschinellen Lernens. Springer, 45: 5-32. doi:10.1023/A:1010933404324
Chastain, R., Housman, I., Goldstein, J., Finco, M. und Tenneson, K., 2019. Empirical cross sensor comparison of Sentinel-2A and 2B MSI, Landsat-8 OLI, and Landsat-7 ETM top of atmosphere spectral characteristics over the conterminous United States. In: Remote Sensing of Environment. Science Direct, 221: 274–285. doi:10.1016/j.rse.2018.11.012
Cohen, W. B., Yang, Z. und Kennedy, R., 2010. Erkennen von Trends bei Waldstörungen und ‑erholung mithilfe jährlicher Landsat-Zeitreihen: 2. TimeSync – Tools für die Kalibrierung und Validierung. In: Remote Sensing of Environment. Science Direct, 114(12): 2911–2924. doi:10.1016/j.rse.2010.07.010
Cohen, W. B., Yang, Z., Healey, S. P., Kennedy, R. E. und Gorelick, N., 2018. Ein multispektrales LandTrendr-Ensemble zur Erkennung von Waldstörungen. In: Remote Sensing of Environment. Science Direct, 205: 131–140. doi:10.1016/j.rse.2017.11.015
Foga, S., Scaramuzza, P.L., Guo, S., Zhu, Z., Dilley, R.D., Beckmann, T., Schmidt, G.L., Dwyer, J.L., Hughes, M.J., Laue, B., 2017. Vergleich und Validierung von Algorithmen zur Erkennung von Wolken für operationelle Landsat-Datenprodukte. In: Remote Sensing of Environment. Science Direct, 194: 379–390. doi:10.1016/j.rse.2017.03.026
U.S. Geological Survey, 2019 Digitales Höhenmodell des USGS 3D Elevation Program, abgerufen im August 2022 unter https://developers.google.com/earth-engine/datasets/catalog/USGS_3DEP_10m
Healey, S. P., Cohen, W. B., Yang, Z., Kenneth Brewer, C., Brooks, E. B., Gorelick, N., Hernandez, A. J., Huang, C., Joseph Hughes, M., Kennedy, R. E., Loveland, T. R., Moisen, G. G., Schroeder, T. A., Stehman, S. V. Vogelmann, J. E., Woodcock, C. E., Yang, L. und Zhu, Z., 2018. Mapping forest change using stacked generalization: An ensemble approach. In: Remote Sensing of Environment. Science Direct, 204: 717–728. doi:10.1016/j.rse.2017.09.029
Kennedy, R. E., Yang, Z., and Cohen, W. B., 2010. Erkennen von Trends bei Waldstörungen und ‑erholung mithilfe jährlicher Landsat-Zeitreihen: 1. LandTrendr – Algorithmen für die zeitliche Segmentierung. In: Remote Sensing of Environment. Science Direct, 114(12): 2897–2910. doi:10.1016/j.rse.2010.07.008
Kennedy, R., Yang, Z., Gorelick, N., Braaten, J., Cavalcante, L., Cohen, W. und Healey, S. 2018. Implementierung des LandTrendr-Algorithmus in Google Earth Engine. In Remote Sensing. MDPI, 10(5): 691. doi:10.3390/rs10050691
Pasquarella, V. J., Brown, C. F., Czerwinski, W. und Rucklidge, W. J., 2023. Umfassende Qualitätsbewertung von optischen Satellitenbildern mit schwach überwachtem Videolernen. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2124–2134.
Sentinel-Hub, 2021. Sentinel 2 Cloud Detector [Online] Verfügbar unter: https://github.com/sentinel-hub/sentinel2-cloud-detector
Weiss, A.D., 2001. Topografische Position und Analyse von Landformen Posterpräsentation, ESRI Users Conference, San Diego, CAZhu, Z., und Woodcock, C. E. 2012. Objektbasierte Erkennung von Wolken und Wolkenschatten in Landsat-Bildern. 118: 83-94.
Zhu, Z. und Woodcock, C. E., 2012. Objektbasierte Erkennung von Wolken und Wolkenschatten in Landsat-Bildern. In: Remote Sensing of Environment. Science Direct, 118: 83–94. doi:10.1016/j.rse.2011.10.028
Zhu, Z. und Woodcock, C. E., 2014. Kontinuierliche Erkennung von Veränderungen und Klassifizierung der Bodenbedeckung mit allen verfügbaren Landsat-Daten. In: Remote Sensing of Environment. Science Direct, 144: 152–171. doi:10.1016/j.rse.2014.01.011
DOIs
- https://doi.org/10.1016/j.rse.2010.07.008
- https://doi.org/10.1016/j.rse.2010.07.010
- https://doi.org/10.1016/j.rse.2011.10.028
- https://doi.org/10.1016/j.rse.2014.01.011
- https://doi.org/10.1016/j.rse.2017.03.026
- https://doi.org/10.1016/j.rse.2017.09.029
- https://doi.org/10.1016/j.rse.2017.11.015
- https://doi.org/10.1016/j.rse.2018.11.012
- https://doi.org/10.1023/A:1010933404324
- https://doi.org/10.3390/rs10050691
Die Earth Engine nutzen
Code-Editor (JavaScript)
var dataset = ee.ImageCollection('USFS/GTAC/LCMS/v2024-10'); var lcms = dataset.filterDate('2022', '2023') // range: [1985, 2024] .filter('study_area == "CONUS"') // "AK", "HAWAII", "PRUSVI" .first(); Map.addLayer(lcms.select('Land_Cover'), {}, 'Land Cover'); Map.addLayer(lcms.select('Land_Use'), {}, 'Land Use'); Map.addLayer(lcms.select('Change'), {}, 'Vegetation Change', false); Map.setCenter(-98.58, 38.14, 4);