- Disponibilité de l'ensemble de données
- 1985-01-01T00:00:00Z–2024-12-31T00:00:00Z
- Fournisseur de l'ensemble de données
- Bureau géospatial du Centre d'innovation et des services sur le terrain (FSIC-GO) de l'USDA Forest Service (USFS)
- Tags
Description
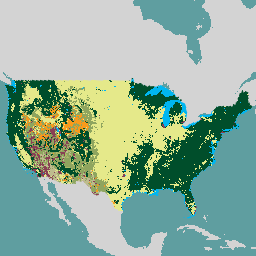
Ce produit fait partie de la suite de données du système de surveillance des changements de paysage (LCMS, Landscape Change Monitoring System). Il indique les classes de changement, de couverture terrestre et/ou d'utilisation des terres modélisées par le LCMS pour chaque année et couvre les États-Unis continentaux (CONUS), ainsi que les zones en dehors des États-Unis continentaux (OCONUS), y compris l'Alaska (AK), Porto Rico et les Îles Vierges américaines (PRUSVI), et Hawaï (HAWAII).
LCMS est un système de télédétection permettant de cartographier et de surveiller les changements de paysage aux États-Unis. Son objectif est de développer une approche cohérente utilisant les dernières technologies et avancées en matière de détection des changements pour produire une carte "la plus précise possible" des changements de paysage.
Les sorties incluent trois produits annuels : les changements, la couverture du sol et l'occupation du sol. Le résultat du modèle de changement concerne spécifiquement la couverture végétale et inclut la perte lente, la perte rapide (qui inclut également les changements hydrologiques tels que l'inondation ou la dessiccation) et le gain. Ces valeurs sont prévues pour chaque année de la série temporelle Landsat et servent de produits de base pour LCMS. Nous appliquons un ensemble de règles basées sur des ensembles de données auxiliaires pour créer le produit de changement final, qui est un affinement/une reclassification du changement modélisé en 15 classes qui fournissent explicitement des informations sur la cause du changement de paysage (par exemple, Enlèvement d'arbres, incendie de forêt, dommages causés par le vent). Les cartes de couverture et d'utilisation des sols représentent la couverture des sols au niveau des formes de vie et l'utilisation des sols à un niveau général pour chaque année.
Étant donné qu'aucun algorithme n'est le plus performant dans toutes les situations, LCMS utilise un ensemble de modèles comme prédicteurs, ce qui améliore la précision des cartes pour un large éventail d'écosystèmes et de processus de changement (Healey et al., 2018). La suite de cartes sur les changements de LCMS, la couverture des sols et l'utilisation des terres qui en résulte offre une représentation globale des changements de paysage aux États-Unis depuis 1985.
Les couches de prédiction du modèle LCMS incluent les sorties des algorithmes de détection des changements LandTrendr et CCDC, ainsi que des informations sur le terrain. Tous ces composants sont accessibles et traités à l'aide de Google Earth Engine (Gorelick et al., 2017).
Pour produire des composites annuels pour LandTrendr, les données de réflectance au sommet de l'atmosphère de niveau 1 des collections 2 de Landsat et des niveaux 1C de Sentinel 2A et 2B ont été utilisées. L'algorithme de masquage des nuages cFmask (Foga et al., 2017), qui est une implémentation de Fmask 2.0 (Zhu et Woodcock, 2012) (Landsat uniquement), cloudScore (Chastain et al., 2019) (Landsat uniquement), s2cloudless (Sentinel-Hub, 2021) et Cloud Score+ (Pasquarella et al., 2023) (Sentinel-2 uniquement) sont utilisées pour masquer les nuages, tandis que TDOM (Chastain et al., 2019) est utilisé pour masquer les ombres de nuages (Landsat et Sentinel-2). Pour LandTrendr, le médoïde annuel est ensuite calculé pour résumer les valeurs sans nuages ni ombres de nuages de chaque année en un seul composite. Pour CCDC, les données de réflectance de surface Landsat de niveau 1 de la collection 2 de l'Institut d'études géologiques des États-Unis (USGS) ont été utilisées pour le CONUS, et les données de réflectance au sommet de l'atmosphère Landsat de niveau 1 pour l'Alaska, Porto Rico, les îles Vierges des États-Unis et Hawaï.
La série temporelle composite est segmentée temporellement à l'aide de LandTrendr (Kennedy et al., 2010 ; Kennedy et al., 2018 ; Cohen et al., 2018).
Toutes les valeurs sans nuage ni ombre de nuage sont également segmentées temporellement à l'aide de l'algorithme CCDC (Zhu et Woodcock, 2014).
Les données du prédicteur incluent les valeurs composites brutes, les valeurs ajustées LandTrendr, les différences par paires, la durée du segment, l'amplitude et la pente de la variation, ainsi que les coefficients de sinus et de cosinus CCDC (3 premières harmoniques), les valeurs ajustées et les différences par paires, ainsi que l'altitude, la pente, le sinus de l'aspect, le cosinus de l'aspect et les indices de position topographique (Weiss, 2001) issus des données 3DEP (3D Elevation Program) de l'USGS (U.S. Geological Survey, 2019) à 10 mètres.
Les données de référence sont collectées à l'aide de TimeSync, un outil Web qui aide les analystes à visualiser et à interpréter l'enregistrement des données Landsat de 1984 à aujourd'hui (Cohen et al., 2010).
Des modèles de forêt aléatoire (Breiman, 2001) ont été entraînés à l'aide de données de référence issues de TimeSync et de données de prédiction issues de LandTrendr, CCDC et d'indices de terrain pour prédire les classes de changement annuel, de couverture terrestre et d'utilisation des terres. Après la modélisation, nous établissons une série de seuils de probabilité et d'ensembles de règles à l'aide d'ensembles de données auxiliaires pour améliorer la qualité des cartes et réduire les erreurs de commission et d'omission. Pour en savoir plus, consultez le document "LCMS Methods Brief" inclus dans la description.
Autres ressources
Exemple de code plus détaillé sur l'utilisation des données LCMS
L'explorateur de données LCMS est une application Web qui permet aux utilisateurs d'afficher, d'analyser, de résumer et de télécharger des données LCMS.
Pour en savoir plus sur les méthodes et l'évaluation de la précision, consultez le résumé des méthodes LCMS. Pour télécharger des données, des métadonnées et des documents d'aide, consultez le Clearinghouse de données géographiques LCMS.
La chaîne "HAWAII" sera remplacée par "HI" dans la prochaine version 2025.11 des données.
Pour toute question ou demande de données spécifiques, contactez sm.fs.lcms@usda.gov.
Bracelets
Taille des pixels
30 mètres
Bandes de fréquences
| Nom | Taille des pixels | Description | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Change |
mètres | Produit final de modification thématique du LCMS. Un total de quinze classes de changement sont mappées pour chaque année. Fondamentalement, le changement est modélisé avec trois modèles de forêt aléatoire binaire distincts pour chaque zone d'étude : perte lente, perte rapide et gain. Chaque pixel est attribué à la classe de changement modélisée ayant la probabilité la plus élevée et supérieure à un seuil spécifié. Tout pixel dont la valeur est inférieure au seuil de chaque classe est attribué à la classe "Stable". En suivant un ensemble de règles utilisant la classe de changement modélisée, des ensembles de données auxiliaires (tels que TCC, MTBS et IDS) et les données de couverture terrestre LCMS, l'une des 15 classes de causes de changement affinées est attribuée à chaque pixel. Pour en savoir plus sur l'ensemble de règles et les ensembles de données auxiliaires utilisés, consultez le document "LCMS Methods Brief" dont le lien figure dans la description. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover |
mètres | Produit final thématique de couverture des sols LCMS. Au total, 14 classes de couverture terrestre sont cartographiées chaque année à l'aide de données de référence TimeSync et d'informations spectrales issues des images Landsat. La couverture terrestre est prédite à l'aide d'un seul modèle de forêt aléatoire multiclasse, qui génère un tableau des probabilités de chaque classe (proportion des arbres au sein du modèle de forêt aléatoire qui ont "choisi" chaque classe). Les classes finales sont attribuées à l'utilisation des terres présentant la probabilité la plus élevée. Avant d'attribuer la classe de couverture terrestre ayant la probabilité la plus élevée, en fonction de la zone d'étude, un à plusieurs seuils de probabilité et ensembles de règles utilisant des ensembles de données auxiliaires ont été appliqués. Pour en savoir plus sur les seuils de probabilité et les ensembles de règles, consultez le document "LCMS Methods Brief" dont le lien figure dans la description. Sept classes de couverture terrestre indiquent une seule couverture terrestre, où ce type de couverture terrestre couvre la majeure partie de la superficie du pixel et aucune autre classe ne couvre plus de 10 % du pixel. Sept cours mixtes sont également proposés. Il s'agit des pixels dans lesquels une classe de couverture terrestre supplémentaire couvre au moins 10 % du pixel. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use |
mètres | Produit final thématique LCMS sur l'utilisation des terres. Au total, cinq classes d'utilisation des terres sont cartographiées chaque année à l'aide des données de référence TimeSync et des informations spectrales issues des images Landsat. L'utilisation des terres est prédite à l'aide d'un seul modèle de forêt aléatoire multiclasse, qui génère un tableau des probabilités de chaque classe (proportion des arbres dans le modèle de forêt aléatoire qui ont "choisi" chaque classe). Les classes finales sont attribuées à l'utilisation des terres présentant la probabilité la plus élevée. Avant d'attribuer la classe d'utilisation des terres ayant la probabilité la plus élevée, une série de seuils de probabilité et d'ensembles de règles utilisant des ensembles de données auxiliaires ont été appliqués. Pour en savoir plus sur les seuils de probabilité et les ensembles de règles, consultez le document "LCMS Methods Brief" dont le lien figure dans la description. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Slow_Loss |
mètres | Probabilité de perte lente modélisée par LCMS brut. La perte lente inclut les classes suivantes de l'interprétation du processus de modification TimeSync :
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Fast_Loss |
mètres | Probabilité modélisée brute de perte rapide (LCMS). La perte rapide inclut les classes suivantes de l'interprétation du processus de modification TimeSync :
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Change_Raw_Probability_Gain |
mètres | Probabilité de gain modélisée brute du LCMS. Définition : terres présentant une augmentation du couvert végétal en raison de la croissance et de la succession sur une ou plusieurs années. Applicable à toutes les zones susceptibles d'exprimer un changement spectral associé à la repousse de la végétation. Dans les zones développées, la croissance peut résulter de la maturation de la végétation et/ou de l'installation de nouvelles pelouses et de nouveaux aménagements paysagers. Dans les forêts, la croissance comprend la croissance de la végétation à partir de sols nus, ainsi que le dépassement des arbres intermédiaires et codominants et/ou des herbes et arbustes situés plus bas. Les segments de croissance/récupération enregistrés après la récolte forestière passeront probablement par différentes classes de couverture terrestre à mesure que la forêt se régénérera. Pour que ces changements soient considérés comme une croissance/récupération, les valeurs spectrales doivent suivre de près une tendance à la hausse (par exemple, une pente positive qui, si elle était prolongée sur environ 20 ans, serait de l'ordre de 0,10 unité de NDVI) qui persiste pendant plusieurs années. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Trees |
mètres | Probabilité modélisée brute de LCMS pour les arbres. Définition : la majorité du pixel est constituée d'arbres vivants ou morts sur pied. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Tall-Shrubs-and-Trees-Mix |
mètres | Probabilité modélisée brute de LCMS pour le mélange d'arbustes et d'arbres de grande taille (Alaska uniquement). Définition : la majorité du pixel est constituée d'arbustes de plus d'un mètre de haut et d'au moins 10 % d'arbres vivants ou morts sur pied. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Shrubs-and-Trees-Mix |
mètres | Probabilité modélisée brute de LCMS pour le mélange d'arbustes et d'arbres. Définition : la majorité du pixel est composée d'arbustes et d'au moins 10 % d'arbres vivants ou morts sur pied. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb-and-Trees-Mix |
mètres | Probabilité modélisée brute du LCMS pour le mélange d'herbes/plantes herbacées/arbres. Définition : la majorité du pixel est composée de graminées vivaces, de plantes herbacées ou d'autres formes de végétation herbacée, et d'au moins 10 % d'arbres vivants ou morts sur pied. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Trees-Mix |
mètres | Probabilité modélisée brute de la couverture terrestre LCMS pour les zones "Barren" (Dénudé) et "Trees Mix" (Forêt mixte). Définition : la majorité du pixel est constituée de sol nu exposé par des perturbations (par exemple, sol découvert par un défrichage mécanique ou une exploitation forestière), ainsi que de zones stériles pérennes telles que les déserts, les playas, les affleurements rocheux (y compris les minéraux et autres matériaux géologiques exposés par les activités minières de surface), les dunes de sable, les salines et les plages. Les routes en terre et en gravier sont également considérées comme arides et comportent au moins 10 % d'arbres vivants ou morts sur pied. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Tall-Shrubs |
mètres | Probabilité modélisée brute de LCMS pour les arbustes de grande taille (Alaska uniquement). Définition : la majorité du pixel est constituée d'arbustes de plus d'un mètre de haut. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Shrubs |
mètres | Probabilité modélisée brute de LCMS pour les arbustes. Définition : la majorité du pixel est composée d'arbustes. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb-and-Shrubs-Mix |
mètres | Probabilité modélisée brute de la couverture terrestre LCMS pour le mélange d'herbes, de plantes herbacées et d'arbustes. Définition : la majorité du pixel est composée de graminées vivaces, de plantes herbacées ou d'autres formes de végétation herbacée, et d'au moins 10 % d'arbustes. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Shrubs-Mix |
mètres | Probabilité modélisée brute de la couverture terrestre LCMS pour le mélange de zones dénudées et d'arbustes. Définition : la majorité du pixel est constituée de sol nu exposé par des perturbations (par exemple, sol découvert par un défrichage mécanique ou une exploitation forestière), ainsi que de zones stériles pérennes telles que les déserts, les playas, les affleurements rocheux (y compris les minéraux et autres matériaux géologiques exposés par les activités minières de surface), les dunes de sable, les salines et les plages. Les routes en terre et en gravier sont également considérées comme arides et comprennent au moins 10 % d'arbustes. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Grass-Forb-Herb |
mètres | Probabilité brute modélisée par LCMS pour Grass/Forb/Herb. Définition : la majorité du pixel est composée de graminées vivaces, de plantes herbacées ou d'autres formes de végétation herbacée. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-and-Grass-Forb-Herb-Mix |
mètres | Probabilité modélisée brute LCMS de la catégorie "Barren" (Stérile) et "Grass/Forb/Herb Mix" (Mélange d'herbes/plantes herbacées/plantes à feuilles larges). Définition : la majorité du pixel est constituée de sol nu exposé par des perturbations (par exemple, sol découvert par défrichage mécanique ou exploitation forestière), ainsi que de zones pérennes stériles telles que les déserts, les playas, les affleurements rocheux (y compris les minéraux et autres matériaux géologiques exposés par les activités minières de surface), les dunes de sable, les salines et les plages. Les routes en terre et en gravier sont également considérées comme arides et sont également composées d'au moins 10 % de graminées vivaces, de plantes herbacées ou d'autres formes de végétation herbacée. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Barren-or-Impervious |
mètres | Probabilité brute modélisée par LCMS de la catégorie "Stérile ou imperméable". Définition : la majorité du pixel est composée de 1) sol nu exposé par une perturbation (par exemple, sol découvert par un défrichage mécanique ou une exploitation forestière), ainsi que de zones perpétuellement stériles telles que les déserts, les playas, les affleurements rocheux (y compris les minéraux et autres matériaux géologiques exposés par les activités minières de surface), les dunes de sable, les salines et les plages. Les routes en terre et en gravier sont également considérées comme stériles ou 2) les matériaux artificiels que l'eau ne peut pas pénétrer, tels que les routes pavées, les toits et les parkings. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Snow-or-Ice |
mètres | Probabilité brute modélisée de neige ou de verglas par LCMS. Définition : la majorité du pixel est composée de neige ou de glace. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Cover_Raw_Probability_Water |
mètres | Probabilité modélisée brute de présence d'eau dans LCMS. Définition : la majorité du pixel est constituée d'eau. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Agriculture |
mètres | Probabilité brute de la catégorie "Agriculture" modélisée par LCMS. Définition : terres utilisées pour la production d'aliments, de fibres et de combustibles, qu'elles soient végétalisées ou non. Cela inclut, sans s'y limiter, les terres cultivées et non cultivées, les prairies, les vergers, les vignobles, les élevages intensifs et les zones plantées pour la production de fruits, de noix ou de baies. Les routes principalement utilisées pour l'agriculture (c'est-à-dire qui ne sont pas utilisées pour les transports en commun d'une ville à une autre) sont considérées comme des terres agricoles. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Developed |
mètres | Probabilité brute de développement modélisée par LCMS. Défini comme : terres recouvertes de structures artificielles (par exemple, zones résidentielles à forte densité, zones commerciales, industrielles, minières ou de transport), ou un mélange de végétation (y compris des arbres) et de structures (par exemple, zones résidentielles à faible densité, pelouses, installations récréatives, cimetières, corridors de transport et de services publics, etc.), y compris toute terre fonctionnellement modifiée par l'activité humaine. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Forest |
mètres | Probabilité modélisée brute de la forêt par LCMS. Définition : terre plantée ou naturellement végétalisée, qui contient (ou est susceptible de contenir) une couverture arborée de 10 % ou plus à un moment donné au cours d'une séquence de succession à court terme. Cela peut inclure des catégories de forêts naturelles, de plantations forestières et de zones humides boisées (feuillus, conifères et/ou mixtes). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Other |
mètres | Probabilité brute modélisée de la catégorie "Autre" dans LCMS. Définition : terres (quelle que soit leur utilisation) où la tendance spectrale ou d'autres preuves suggèrent qu'un événement de perturbation ou de changement s'est produit, mais dont la cause définitive ne peut pas être déterminée ou dont le type de changement ne correspond à aucune des catégories de processus de changement définies ci-dessus. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Land_Use_Raw_Probability_Rangeland-or-Pasture |
mètres | Probabilité brute modélisée par LCMS pour les prairies ou les pâturages. Définition : cette classe inclut toute zone qui est a.) Les terres de parcours, où la végétation est un mélange d'herbes, d'arbustes, de plantes herbacées et de plantes graminoïdes indigènes, qui proviennent en grande partie de facteurs et de processus naturels tels que les précipitations, la température, l'altitude et les incendies, bien qu'une gestion limitée puisse inclure des brûlages dirigés ainsi que le pâturage par des herbivores domestiques et sauvages ; ou b.) Pâturage, où la végétation peut aller d'herbes, de plantes herbacées et de plantes à fleurs mixtes et largement naturelles à une végétation plus gérée, dominée par des espèces d'herbes qui ont été semées et gérées pour maintenir une quasi-monoculture. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
QA_Bits |
mètres | Informations complémentaires sur l'origine des valeurs annuelles de production de produits LCMS. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Modifier le tableau des cours
| Valeur | Couleur | Description |
|---|---|---|
| 1 | #ff09f3 | Vent |
| 2 | #541aff | Ouragan |
| 3 | #e4f5fd | Transition neige ou verglas |
| 4 | #cc982e | Dessiccation |
| 5 | #0adaff | Inondation |
| 6 | #a10018 | Feu prescrit |
| 7 | #d54309 | Wildfire |
| 8 | #fafa4b | Transformation mécanique des terres |
| 9 | #afde1c | Enlèvement d'arbres |
| 10 | #ffc80d | Défoliation |
| 11 | #a64c28 | Scarabée du pin du Sud |
| 12 | #f39268 | Stress lié aux insectes, aux maladies ou à la sécheresse |
| 13 | #c291d5 | Autre perte |
| 14 | #00a398 | Croissance successionnelle de la végétation |
| 15 | #3d4551 | Stable |
| 16 | #1b1716 | Masque de zone non traitée |
Tableau des classes de couverture terrestre
| Valeur | Couleur | Description |
|---|---|---|
| 1 | #004e2b | Arbres |
| 2 | #009344 | Mélange d'arbustes et d'arbres de grande taille (Alaska uniquement) |
| 3 | #61bb46 | Mélange d'arbustes et d'arbres |
| 4 | #acbb67 | Mélange d'herbes, de plantes herbacées et d'arbres |
| 5 | #8b8560 | Barren & Trees Mix |
| 6 | #cafd4b | Arbustes hauts (AK uniquement) |
| 7 | #f89a1c | Arbustes |
| 8 | #8fa55f | Mélange d'herbes, de plantes herbacées et d'arbustes |
| 9 | #bebb8e | Mélange de zones arides et d'arbustes |
| 10 | #e5e98a | Graminées/Plantes herbacées |
| 11 | #ddb925 | Mélange de plantes herbacées/herbes/plantes à fleurs et à feuilles stériles |
| 12 | #893f54 | Stérile ou imperméable |
| 13 | #e4f5fd | Neige ou verglas |
| 14 | #00b6f0 | Eau |
| 15 | #1b1716 | Masque de zone non traitée |
Tableau des classes d'utilisation des terres
| Valeur | Couleur | Description |
|---|---|---|
| 1 | #fbff97 | Agriculture |
| 2 | #e6558b | Développé |
| 3 | #004e2b | Forêt |
| 4 | #9dbac5 | Autre |
| 5 | #a6976a | Pâturage |
| 6 | #1b1716 | Masque de zone non traitée |
Propriétés des images
Propriétés des images
| Nom | Type | Description |
|---|---|---|
| study_area | STRING | Cette version du LCMS couvre les États-Unis contigus, l'Alaska, Porto Rico et les îles Vierges américaines, ainsi qu'Hawaï. Valeurs possibles : "CONUS, AK, PRUSVI, HAWAII" |
| version | STRING | Version du produit |
| startYear | INT | Année de début du produit |
| endYear | INT | Année de fin du produit |
| année | INT | Année du produit |
Conditions d'utilisation
Conditions d'utilisation
Le service forestier de l'USDA ne fournit aucune garantie, explicite ou implicite, y compris les garanties de qualité marchande et d'adéquation à un usage particulier, et n'assume aucune responsabilité légale quant à l'exactitude, la fiabilité, l'exhaustivité ou l'utilité de ces données géospatiales, ni quant à leur utilisation inappropriée ou incorrecte. Ces données géospatiales et les cartes ou graphiques associés ne sont pas des documents juridiques et ne sont pas destinés à être utilisés comme tels. Les données et les cartes ne peuvent pas être utilisées pour déterminer le titre, la propriété, les descriptions ou les limites légales, la juridiction légale ni les restrictions qui peuvent être en place sur les terrains publics ou privés. Les risques naturels peuvent ou non être représentés sur les données et les cartes. Les utilisateurs des terres doivent faire preuve de prudence. Les données sont dynamiques et peuvent changer au fil du temps. Il incombe à l'utilisateur de vérifier les limites des données géospatiales et de les utiliser en conséquence.
Ces données ont été collectées grâce à des fonds du gouvernement américain et peuvent être utilisées sans autorisation ni frais supplémentaires. Si vous utilisez ces données dans une publication, une présentation ou un autre produit de recherche, veuillez utiliser la citation suivante :
Services forestiers américains (USDA). 2025. USFS Landscape Change Monitoring System v2024.10 (États-Unis contigus et États-Unis contigus extérieurs). Salt Lake City, Utah.
Citations
Services forestiers américains (USDA). 2025. Système de surveillance des changements de paysage de l'USFS v2024.10 (États-Unis contigus et États-Unis contigus extérieurs). Salt Lake City, Utah.
Breiman, L., 2001. Forêts aléatoires. Dans le machine learning. Springer, 45: 5-32. doi:10.1023/A:1010933404324
Chastain, R., Housman, I., Goldstein, J., Finco, M., et Tenneson, K., 2019. Comparaison empirique multisensorielle des caractéristiques spectrales au sommet de l'atmosphère des instruments MSI de Sentinel-2A et 2B, OLI de Landsat-8 et ETM de Landsat-7 sur l'ensemble des États-Unis contigus. In Remote Sensing of Environment. Science Direct, 221: 274-285. doi:10.1016/j.rse.2018.11.012
Cohen, W. B. Yang, Z., et Kennedy, R., 2010. Détection des tendances de perturbation et de récupération des forêts à l'aide de séries temporelles Landsat annuelles : 2. TimeSync : outils de calibration et de validation. In Remote Sensing of Environment. Science Direct, 114(12) : 2911-2924. doi:10.1016/j.rse.2010.07.010
Cohen, W. B. Yang, Z., Healey, S. P., Kennedy, R. E., et Gorelick, N., 2018. Ensemble multispectral LandTrendr pour la détection des perturbations forestières. In Remote Sensing of Environment. Science Direct, 205: 131-140. doi:10.1016/j.rse.2017.11.015
Foga, S., Scaramuzza, P.L., Guo, S., Zhu, Z., Dilley, R.D., Beckmann, T., Schmidt, G.L., Dwyer, J.L., Hughes, M.J., Laue, B., 2017. Comparaison et validation des algorithmes de détection des nuages pour les produits de données Landsat opérationnels. In Remote Sensing of Environment. Science Direct, 194 : 379-390. doi:10.1016/j.rse.2017.03.026
U.S. Geological Survey, 2019. Modèle numérique d'élévation du programme 3D Elevation de l'USGS, consulté en août 2022 sur https://developers.google.com/earth-engine/datasets/catalog/USGS_3DEP_10m
Healey, S. P., Cohen, W. B. Yang, Z., Kenneth Brewer, C., Brooks, E. B. Gorelick, N., Hernandez, A. J., Huang, C., Joseph Hughes, M., Kennedy, R. E., Loveland, T. R. Moisen, G. G., Schroeder, T. A., Stehman, S. V., Vogelmann, J. E., Woodcock, C. E., Yang, L., et Zhu, Z., 2018. Cartographie des changements forestiers à l'aide de la généralisation empilée : une approche d'ensemble. In Remote Sensing of Environment. Science Direct, 204: 717-728. doi:10.1016/j.rse.2017.09.029
Kennedy, R. E., Yang, Z., et Cohen, W. B. 2010. Détecter les tendances des perturbations et de la régénération des forêts à l'aide de séries temporelles Landsat annuelles : 1. LandTrendr : algorithmes de segmentation temporelle. In Remote Sensing of Environment. Science Direct, 114(12): 2897-2910. doi:10.1016/j.rse.2010.07.008
Kennedy, R., Yang, Z., Gorelick, N., Braaten, J., Cavalcante, L., Cohen, W. et Healey, S. 2018. Implémentation de l'algorithme LandTrendr sur Google Earth Engine. In Remote Sensing. MDPI, 10(5): 691. doi:10.3390/rs10050691
Pasquarella, V. J., Brown, C. F., Czerwinski, W., et Rucklidge, W. J., 2023. Évaluation complète de la qualité des images satellite optiques à l'aide de l'apprentissage vidéo faiblement supervisé. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2124-2134.
Sentinel-Hub, 2021. Détecteur de nuages Sentinel 2. [En ligne]. Disponible à l'adresse suivante : https://github.com/sentinel-hub/sentinel2-cloud-detector
Weiss, A.D., 2001. Analyse de la position topographique et des formes de relief Présentation sous forme de poster, ESRI Users Conference, San Diego, CAZhu, Z., et Woodcock, C. E. vers 2012. Détection des nuages et des ombres de nuages basée sur les objets dans les images Landsat. 118 : 83-94.
Zhu, Z. et Woodcock, C. E., vers 2012. Détection des nuages et des ombres de nuages basée sur les objets dans les images Landsat. In Remote Sensing of Environment. Science Direct, 118 : 83-94. doi:10.1016/j.rse.2011.10.028
Zhu, Z. et Woodcock, C. E., 2014. Détection et classification continues des changements de couverture terrestre à l'aide de toutes les données Landsat disponibles. In Remote Sensing of Environment. Science Direct, 144: 152-171. doi:10.1016/j.rse.2014.01.011
DOI
- https://doi.org/10.1016/j.rse.2010.07.008
- https://doi.org/10.1016/j.rse.2010.07.010
- https://doi.org/10.1016/j.rse.2011.10.028
- https://doi.org/10.1016/j.rse.2014.01.011
- https://doi.org/10.1016/j.rse.2017.03.026
- https://doi.org/10.1016/j.rse.2017.09.029
- https://doi.org/10.1016/j.rse.2017.11.015
- https://doi.org/10.1016/j.rse.2018.11.012
- https://doi.org/10.1023/A:1010933404324
- https://doi.org/10.3390/rs10050691
Explorer avec Earth Engine
Éditeur de code (JavaScript)
var dataset = ee.ImageCollection('USFS/GTAC/LCMS/v2024-10'); var lcms = dataset.filterDate('2022', '2023') // range: [1985, 2024] .filter('study_area == "CONUS"') // "AK", "HAWAII", "PRUSVI" .first(); Map.addLayer(lcms.select('Land_Cover'), {}, 'Land Cover'); Map.addLayer(lcms.select('Land_Use'), {}, 'Land Use'); Map.addLayer(lcms.select('Change'), {}, 'Vegetation Change', false); Map.setCenter(-98.58, 38.14, 4);