Scopri come utilizzare l'API Scene Semantics nelle tue app.
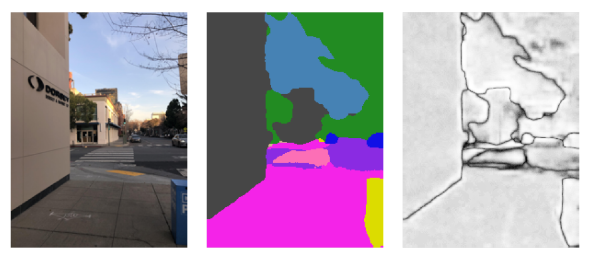
L'API Scene Semantics consente agli sviluppatori di comprendere la scena che circonda l'utente, fornendo informazioni semantiche in tempo reale basate su modelli ML. Data un'immagine di una scena all'aperto, l'API restituisce un'etichetta per ogni pixel in un insieme di classi semantiche utili, come cielo, edificio, albero, strada, marciapiede, veicolo, persona e altro ancora. Oltre alle etichette dei pixel, l'API Scene Semantics offre anche valori di confidenza per ogni etichetta del pixel e un modo semplice per eseguire query sulla prevalenza di una determinata etichetta in una scena all'aperto.
Da sinistra a destra, esempi di un'immagine di input, l'immagine semantica delle etichette dei pixel e l'immagine di confidenza corrispondente:
Prerequisiti
Prima di procedere, assicurati di conoscere i concetti fondamentali dell'AR e come configurare una sessione ARCore.
Attivare la semantica della scena
In una nuova sessione ARCore, controlla se il dispositivo di un utente supporta l'API Scene Semantics. Non tutti i dispositivi compatibili con ARCore supportano l'API Scene Semantics a causa di limitazioni della potenza di elaborazione.
Per risparmiare risorse, la funzionalità Scene Semantics è disattivata per impostazione predefinita su ARCore. Attiva la modalità semantica per consentire alla tua app di utilizzare l'API Scene Semantics.
GARSessionConfiguration *configuration = [[GARSessionConfiguration alloc] init];
if ([self.garSession isSemanticModeSupported:GARSemanticModeEnabled]) {
configuration.semanticMode = GARSemanticModeEnabled;
}
NSError *error;
[self.garSession setConfiguration:configuration error:&error];
Ottenere l'immagine semantica
Una volta attivata la funzionalità Scienza delle scene, l'immagine semantica può essere recuperata. L'immagine semantica è un'immagine kCVPixelFormatType_OneComponent8, in cui ogni pixel corrisponde a un'etichetta semantica definita da GARSemanticLabel.
Utilizza GARFrame.semanticImage per acquisire l'immagine semantica:
CVPixelBuffer semanticImage = garFrame.semanticImage;
if (semanticImage) {
// Use the semantic image here
} else {
// Semantic images are not available.
// The output image may be missing for the first couple frames before the model has had a
// chance to run yet.
}
Le immagini semantiche di output dovrebbero essere disponibili dopo circa 1-3 frame dall'inizio della sessione, a seconda del dispositivo.
Ottenere l'immagine "con fiducia"
Oltre all'immagine semantica, che fornisce un'etichetta per ogni pixel, l'API fornisce anche un'immagine di confidenza dei valori di confidenza dei pixel corrispondenti. L'immagine di confidenza è un'immagine kCVPixelFormatType_OneComponent8, in cui ogni pixel corrisponde a un valore nell'intervallo [0, 255], corrispondente alla probabilità associata all'etichetta semantica per ogni pixel.
Utilizza GARFrame.semanticConfidenceImage per acquisire l'immagine dell'affidabilità semantica:
CVPixelBuffer confidenceImage = garFrame.semanticConfidenceImage;
if (confidenceImage) {
// Use the semantic image here
} else {
// Semantic images are not available.
// The output image may be missing for the first couple frames before the model has had a
// chance to run yet.
}
Le immagini di confidenza in uscita dovrebbero essere disponibili dopo circa 1-3 frame dall'inizio della sessione, a seconda del dispositivo.
Esegui una query sulla frazione di pixel per un'etichetta semantica
Puoi anche eseguire query sulla frazione di pixel nell'inquadratura corrente che appartengono a una determinata classe, ad esempio il cielo. Questa query è più efficiente rispetto alla restituzione dell'immagine semantica ed esecuzione di una ricerca pixel per pixel di un'etichetta specifica. La frazione restituita è un valore in virgola mobile compreso nell'intervallo [0.0, 1.0].
Utilizza fractionForSemanticLabel: per acquisire la frazione per una determinata etichetta:
// Ensure that semantic data is present for the GARFrame.
if (garFrame.semanticImage) {
float fraction = [garFrame fractionForSemanticLabel:GARSemanticLabelSky];
}